リモートコントロール(RC)戦車をつくる【組み上げ~動作確認】 [RC戦車]
制御回路部の作製ができたので、ベース車体を組み上げます。
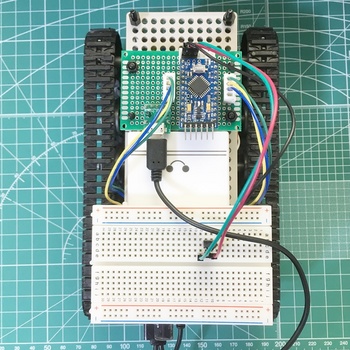
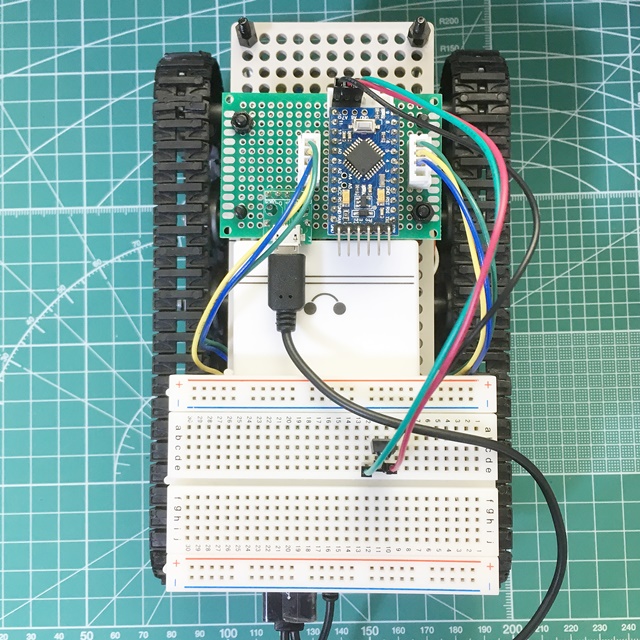
制御回路部とモバイルバッテリーの高さは、なるべく上面をツラ一に合わせるようにして、フラットな感じにしました。
周辺部の赤外線受光部は、暫定的にブレッドボードに実装してモバイルバッテリーに仮置き、ジャンパワイヤで接続しています。
【組み上げ】
【車体①(上面)】
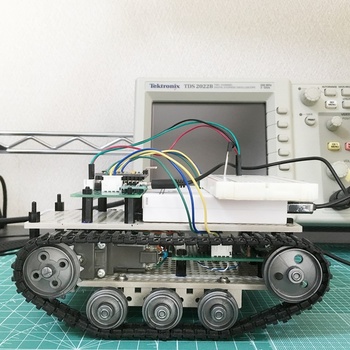
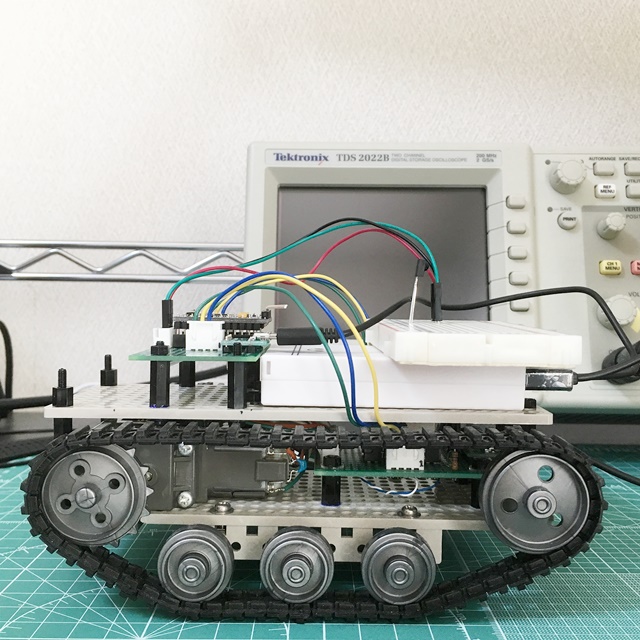
【車体②(側面)】
【動作確認】
いよいよシェイクダウンです。どんなものでも初物はドキドキ![[黒ハート]](https://blog.ss-blog.jp/_images_e/136.gif) です。
です。
再生できない場合、ダウンロードは🎥こちら
動作ロジックは間違いなさそうです。
ただ、動作を変えるタイミングで停止(ストップ)と100μsのwaitを入れているので、少々かったるい感じはします。

制御回路部とモバイルバッテリーの高さは、なるべく上面をツラ一に合わせるようにして、フラットな感じにしました。
周辺部の赤外線受光部は、暫定的にブレッドボードに実装してモバイルバッテリーに仮置き、ジャンパワイヤで接続しています。
【組み上げ】
【車体①(上面)】
【車体②(側面)】
【動作確認】
いよいよシェイクダウンです。どんなものでも初物はドキドキ
再生できない場合、ダウンロードは🎥こちら
動作ロジックは間違いなさそうです。
ただ、動作を変えるタイミングで停止(ストップ)と100μsのwaitを入れているので、少々かったるい感じはします。
リモートコントロール(RC)戦車をつくる【制御回路】 [RC戦車]
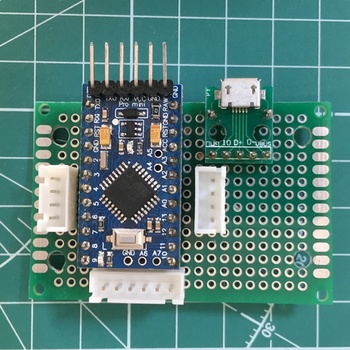
Arduino Pro Miniを搭載した制御回路部を作製します。
Arduino Pro Miniは24ピンDIPソケットで実装しています。
赤外線受光部が載る周辺部とのIFはコネクタで接続することにしました。こうすることで周辺部の種類を変更したときにでも、制御回路部はそのまま流用することができます。
コネクタは電源とGNDで2ピン、ユーザ信号用で4ピンとして6ピンコネクタとしました。
ユニバーサル基板にはベース車体と接続するため、ユニバーサルプレートの穴の位置に合わせてM3ネジが入る大きさの穴を四隅にあけています。
【基盤実装】
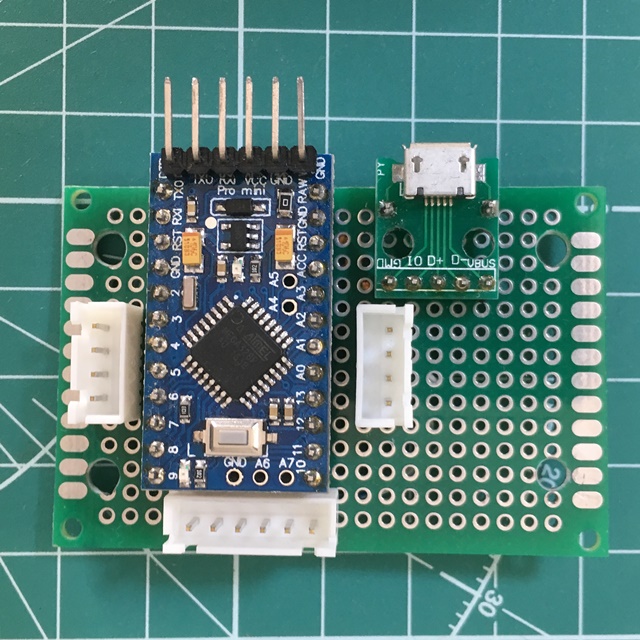
・Top view
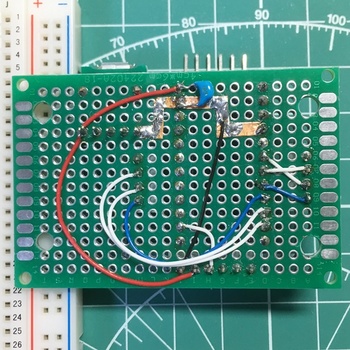
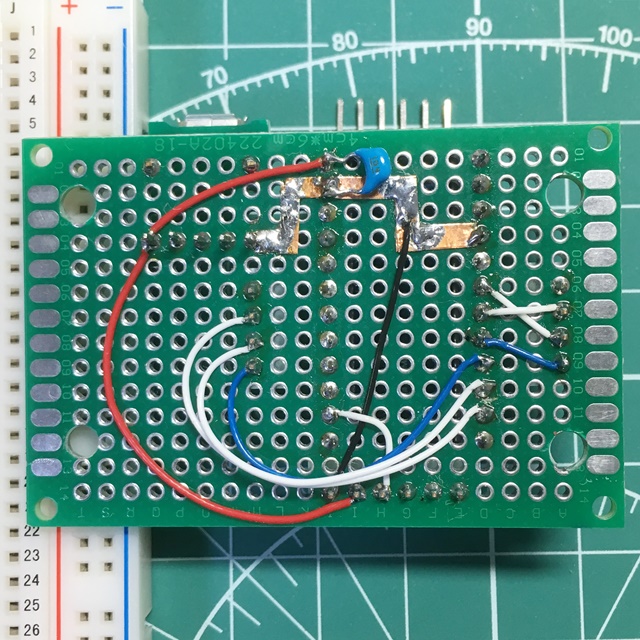
・Bottom view
【回路図】
forRC_Tank.jpg)
Arduino Pro Miniは24ピンDIPソケットで実装しています。
赤外線受光部が載る周辺部とのIFはコネクタで接続することにしました。こうすることで周辺部の種類を変更したときにでも、制御回路部はそのまま流用することができます。
コネクタは電源とGNDで2ピン、ユーザ信号用で4ピンとして6ピンコネクタとしました。
ユニバーサル基板にはベース車体と接続するため、ユニバーサルプレートの穴の位置に合わせてM3ネジが入る大きさの穴を四隅にあけています。
【基盤実装】
・Top view
・Bottom view
【回路図】
forRC_Tank.jpg)



