ダイソーの500円モバイルバッテリーは電子工作でも使えるぞ [Gadget]
以前に、電子工作で使えるモバイルバッテリーとして"cheero Canvas 3200mAh IoT機器対応 モバイルバッテリー"の紹介をしました。
これはオートパワーオフ機能がなく、微弱電流を流し続けることができるバッテリーです。
リモートコントロール(RC)戦車をつくる【IoT機器対応モバイルバッテリー】
用途として少々特殊だったりするので、お値段が少しお高めなのがネックなのですが、最近気になる記事を見つけてさっそく購入してみました。
100均(ダイソー)の500円モバイルバッテリーがArduino用電源になるかあれこれ試してみた:ウェブ情報実験室
"https://japanese.engadget.com/jp-2019-06-07-100-500-arduino.html"
で、これです↓



この春にモデルチェンジしたそうで、お値段据え置きで3,000mAhから4,000mAhに容量アップしています。
縦横はcheero Canvasよりやや一回り大きいですが、厚みは薄くなっています。
性能等々の解説はネットで検索してもらうといろいろ出てきますのでそちらにお譲りして、電子工作としての実用度なのですが”あり”だと思います。
cheero Canvasのような電源オンオフスイッチはありませんので、オートパワーオフ機能は実装されています。ただ、オートパワーオフを検知するしきい値がそれなりに低いのでパワーオフになりにくい、ということだと思います。
具体的には、Arduino UNO単体であれば電源は切れずに動作しました。
Arduino Pro Mini単体では電源が切れてしまいましたが、超音波測距センサ「SEN136B5B」とXBeeを接続した場合では電源は切れずに動作しました。
出力も5V 1Aなので、モータドライバを駆動するのには少し厳しいかもしれません。
このように利用シーンを選ぶわけですが、500円でお手軽に5V電池を確保できるのはメリットは大きいと思います。

これはオートパワーオフ機能がなく、微弱電流を流し続けることができるバッテリーです。
リモートコントロール(RC)戦車をつくる【IoT機器対応モバイルバッテリー】
用途として少々特殊だったりするので、お値段が少しお高めなのがネックなのですが、最近気になる記事を見つけてさっそく購入してみました。
100均(ダイソー)の500円モバイルバッテリーがArduino用電源になるかあれこれ試してみた:ウェブ情報実験室
"https://japanese.engadget.com/jp-2019-06-07-100-500-arduino.html"
で、これです↓


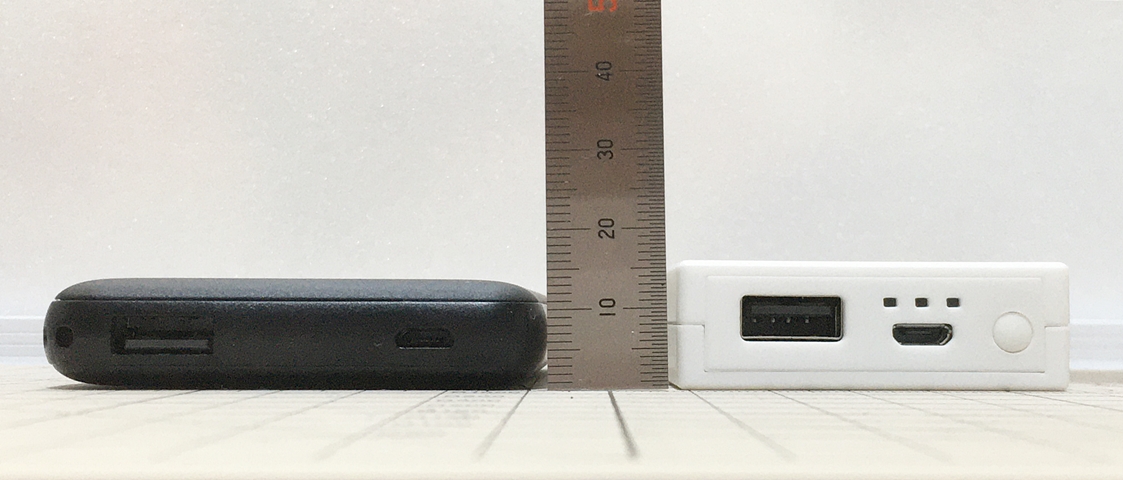
この春にモデルチェンジしたそうで、お値段据え置きで3,000mAhから4,000mAhに容量アップしています。
縦横はcheero Canvasよりやや一回り大きいですが、厚みは薄くなっています。
性能等々の解説はネットで検索してもらうといろいろ出てきますのでそちらにお譲りして、電子工作としての実用度なのですが”あり”だと思います。
cheero Canvasのような電源オンオフスイッチはありませんので、オートパワーオフ機能は実装されています。ただ、オートパワーオフを検知するしきい値がそれなりに低いのでパワーオフになりにくい、ということだと思います。
具体的には、Arduino UNO単体であれば電源は切れずに動作しました。
Arduino Pro Mini単体では電源が切れてしまいましたが、超音波測距センサ「SEN136B5B」とXBeeを接続した場合では電源は切れずに動作しました。
出力も5V 1Aなので、モータドライバを駆動するのには少し厳しいかもしれません。
このように利用シーンを選ぶわけですが、500円でお手軽に5V電池を確保できるのはメリットは大きいと思います。
Arduinoで距離を測る(1)【超音波測距センサ with XBee(動作確認)】 [Arduino]
前回で2byteのシリアル通信ができたので、本番です。
測定した距離をバイナリデータとしてXBee間でシリアル通信して、PCのシリアルモニタに表示をさせます。
一度実測した値をもとに、誤差を修正するための補正値を組み入れました。
補正値を入れる前後の実績値を示します。
超音波測距センサの「SEN136B5B」の測定レンジは3cm~4m(400cm)ですので、測定レンジを外れたら"Out of Range"と表示します。
【スケッチ】
<送信側>
<受信側>
これで遠隔から距離データを取得することができました。
同じプログラムを使い回せば、他にも温度センサからのデータだったりとか、いろいろと応用できそうです。
測定した距離をバイナリデータとしてXBee間でシリアル通信して、PCのシリアルモニタに表示をさせます。
一度実測した値をもとに、誤差を修正するための補正値を組み入れました。
補正値を入れる前後の実績値を示します。
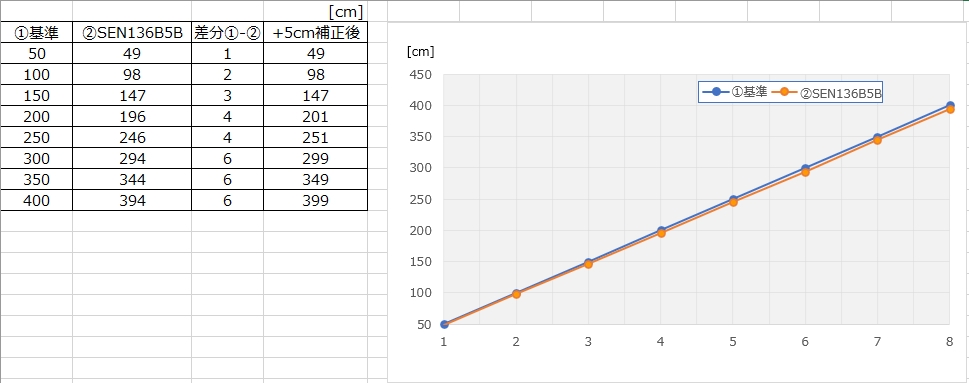
超音波測距センサの「SEN136B5B」の測定レンジは3cm~4m(400cm)ですので、測定レンジを外れたら"Out of Range"と表示します。
【スケッチ】
<送信側>
/*******************************************************************************
超音波測距センサ(SEN136B5B)用XBeeトランスミッタ
++++++ note ++++++
超音波測距センサ(SEN136B5B)用にArduinoUNO-XBee送信機
*******************************************************************************/
// this constant won't change. It's the pin number of the sensor's output:
const int pingPin = 7;
// 初期化(電源投入/リセット時1回のみ実行):
void setup() {
Serial.begin(9600); //9600bpsでシリアルポートを開く
}
// main loop:
void loop() {
long duration; //変数を定義
int cm; //変数を定義
// The PING))) is triggered by a HIGH pulse of 2 or more microseconds.
// モジュールに超音波発信のためのトリガーを与える
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
pinMode(pingPin, OUTPUT); //pingPinを出力ピンに定義
digitalWrite(pingPin, LOW); //LOW出力
delayMicroseconds(2); //2us停止
digitalWrite(pingPin, HIGH); //HIGH出力
delayMicroseconds(5); //5us停止
digitalWrite(pingPin, LOW); //LOW出力
/*
①トリガー信号により40kHzの超音波パルスをモジュールは発信する。
②超音波パルス発信中に、pingPinを出力→入力ピンに変更する。
②超音波パルスを発信し終えたら、pinPinはHIGHに遷移する(超音波パルスをモジュールが受信する
間HIGHを継続(受信したらLOWに遷移))。
④pinPinのHIGH継続時間を測定することで、距離に変換することができる。
*/
// The same pin is used to read the signal from the PING))): a HIGH pulse
// whose duration is the time (in microseconds) from the sending of the ping
// to the reception of its echo off of an object.
pinMode(pingPin, INPUT); //pingPinを入力ピンに定義
duration = pulseIn(pingPin, HIGH); //pingPinがHIGHになっている時間(パルスの長さ)を計測する
// convert the time into a distance
cm = microsecondsToCentimeters(duration); //パルスの長さ(時間)を距離(センチ)に変換
sendIntData(cm);
delay(100); //シリアルポートを溢れさせないように ※delay():単位ms
}
//パルスの長さ(時間)を距離(センチ)に変換する関数
long microsecondsToCentimeters(long microseconds) {
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the object we
// take half of the distance travelled.
return microseconds / 29 / 2;
}
// int型のデータを送信する関数
void sendIntData(int value) {
Serial.write('H'); // ヘッダの送信
Serial.write(lowByte(value)); // 下位バイトの送信
Serial.write(highByte(value)); // 上位バイトの送信
}
<受信側>
/*******************************************************************************
超音波測距センサ(SEN136B5B)用XBeeレシーバ
++++++ note ++++++
超音波測距センサ(SEN136B5B)用にArduinoUNO-XBee受信機
・実測データより受信データが195以上(約2m)には+5cmの補正を加える
・距離データが3(約3cm)未満又は400(約4m)を超えたら、Out of Rangeと表示する
*******************************************************************************/
#define VERSION "1.00a0"
#define hosei 5; //補正値(実測データより求めた)
int recv_data; //受信データ
int range_data; //距離データ
// 初期化(電源投入/リセット時1回のみ実行):
void setup() {
Serial.begin(9600); //9600bpsでシリアルポートを開く
}
// main loop:
void loop(){
// 受信バッファに3バイト(ヘッダ+int)以上のデータが着ているか確認
if ( Serial.available() >= sizeof('H') + sizeof(int) ) {
// ヘッダの確認
if ( Serial.read() == 'H' ){
int low = Serial.read(); //下位バイトの読み取り
int high = Serial.read(); //上位バイトの読み取り
recv_data = makeWord(high,low); //上位バイトと下位バイトを合体させてint型データを復元
// 受信データから表示させる距離データを作成
if(recv_data >= 195){ //195以上ならば補正値を加算する
range_data = recv_data + hosei;
}
else{
range_data = recv_data;
}
// 距離データの表示 range_dataの値をハード・シリアルへ出力する(Arduino→PCモニタ)
if((range_data >= 3) && (range_data <= 400)){ //range_dataが3以上400以下ならば、距離を表示する
Serial.print("Range= ");
Serial.print(range_data);
Serial.println("[cm]");
}
else{ //range_dataがそれ以外ならば、Out of Rangeと表示する
Serial.println("Out of Range");
}
}
}
}
これで遠隔から距離データを取得することができました。
同じプログラムを使い回せば、他にも温度センサからのデータだったりとか、いろいろと応用できそうです。
Arduinoで距離を測る(1)【2バイトのシリアル通信】 [Arduino]
超音波測距センサの「SEN136B5B」の測定レンジは3cm~4m(400cm)です。
測定した距離をバイナリデータとしてXBee間でシリアル通信して、PCのシリアルモニタに表示をさせたいのですが、ここで問題があります。
Serial.write(val)では送信する値(val)は1バイトなのです。
これでは測定レンジの最大値4m(400cm)は送ることができません。。。実際、テストスケッチで試してみても255はシリアルモニタに表示されましたが、256は0となってしまいました。
"それでは1バイトを超えたバイナリデータを送信するためには?"とネットを探し回ってみたところ、
kougaku (id:kougaku-navi)さんの『Imaginary Code』というタイトルのブログから「Arduinoのシリアル通信でint型のデータをやりとりする」のページが分かりやすかったので、参考にしたいと思います。
"https://kougaku-navi.hatenablog.com/entry/20140501/p1"
このページでは「12345」と「-12345」の2バイトのバイナリデータを交互に送信します。
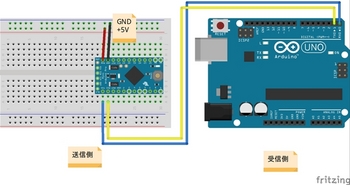
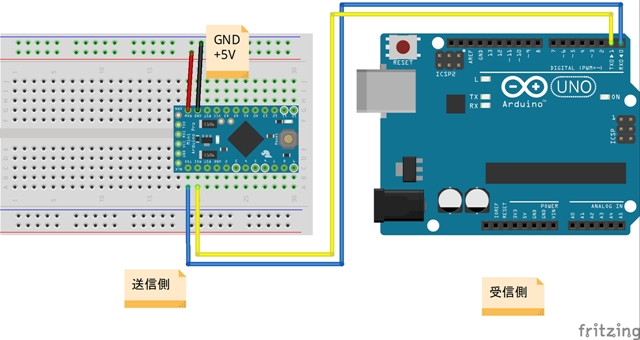
【配線図】
最初はXBeeを使わずに、シリアルポートのTX/RXを有線でつなげて試してみます。
【スケッチ】
送信側から「12345」と「-12345」の2種類のデータを交互に送り、受信側でどちらのデータがきたかチェックして13番ピンに繋がっているLEDをON/OFFします。500ms間隔でLEDが点滅すればOKです。
また、受信側に接続したシリアルモニタで数値を表示します。←追加
<送信側>
・int型のデータを上位バイトと下位バイトに分けて送信する
・データを正しい順序で受信するためにヘッダをつけて送信する
<受信側>
・3バイト(ヘッダ+int)以上のデータが着ているか確認
・データが着てたらまずヘッダがあるか確認
・ヘッダがあったら、下位バイトと上位バイトを読み取り、その値を合体してint型のデータを復元
測定した距離をバイナリデータとしてXBee間でシリアル通信して、PCのシリアルモニタに表示をさせたいのですが、ここで問題があります。
Serial.write(val)では送信する値(val)は1バイトなのです。
これでは測定レンジの最大値4m(400cm)は送ることができません。。。実際、テストスケッチで試してみても255はシリアルモニタに表示されましたが、256は0となってしまいました。
"それでは1バイトを超えたバイナリデータを送信するためには?"とネットを探し回ってみたところ、
kougaku (id:kougaku-navi)さんの『Imaginary Code』というタイトルのブログから「Arduinoのシリアル通信でint型のデータをやりとりする」のページが分かりやすかったので、参考にしたいと思います。
"https://kougaku-navi.hatenablog.com/entry/20140501/p1"
このページでは「12345」と「-12345」の2バイトのバイナリデータを交互に送信します。
【配線図】
最初はXBeeを使わずに、シリアルポートのTX/RXを有線でつなげて試してみます。
【スケッチ】
送信側から「12345」と「-12345」の2種類のデータを交互に送り、受信側でどちらのデータがきたかチェックして13番ピンに繋がっているLEDをON/OFFします。500ms間隔でLEDが点滅すればOKです。
また、受信側に接続したシリアルモニタで数値を表示します。←追加
<送信側>
・int型のデータを上位バイトと下位バイトに分けて送信する
・データを正しい順序で受信するためにヘッダをつけて送信する
/******************************************************************************* テスト用シリアル通信プログラム2byte(送信側) ++++++ note ++++++ ・テスト用シリアル通信プログラム(2byte送信) TX→RX→PCモニタの一連の流れを確認する。 ・下記URLのサイトからサンプルプログラムをコピー https://kougaku-navi.hatenablog.com/entry/20140501/p1 *******************************************************************************/ void setup() { Serial.begin(9600); } void loop() { sendIntData(12345); // int型データの送信 delay(500); sendIntData(-12345); // int型データの送信 delay(500); } // int型のデータを送信する関数 void sendIntData(int value) { Serial.write('H'); // ヘッダの送信 Serial.write(lowByte(value)); // 下位バイトの送信 Serial.write(highByte(value)); // 上位バイトの送信 }
<受信側>
・3バイト(ヘッダ+int)以上のデータが着ているか確認
・データが着てたらまずヘッダがあるか確認
・ヘッダがあったら、下位バイトと上位バイトを読み取り、その値を合体してint型のデータを復元
/******************************************************************************* テスト用シリアル通信プログラム2byte(受信側) ++++++ note ++++++ ・テスト用シリアル通信プログラム(2byte送信) TX→RX→PCモニタの一連の流れを確認する。 ・下記URLのサイトからサンプルプログラムをコピー https://kougaku-navi.hatenablog.com/entry/20140501/p1 ・recv_dataの値をハード・シリアルへ出力する(Arduino→PCモニタ) *******************************************************************************/ int recv_data; // 受信データ void setup() { Serial.begin(9600); pinMode(13, OUTPUT); } void loop() { // 受信バッファに3バイト(ヘッダ+int)以上のデータが着ているか確認 if ( Serial.available() >= sizeof('H') + sizeof(int) ) { // ヘッダの確認 if ( Serial.read() == 'H' ) { int low = Serial.read(); // 下位バイトの読み取り int high = Serial.read(); // 上位バイトの読み取り recv_data = makeWord(high,low); // 上位バイトと下位バイトを合体させてint型データを復元 Serial.println(recv_data); //recv_dataの値をハード・シリアルへ出力する(Arduino→PCモニタ)←追加 } } // 受信したデータに基づいてLEDをON/OFF if ( recv_data == 12345 ) { digitalWrite(13, HIGH); } if ( recv_data == -12345 ) { digitalWrite(13, LOW); } }
Arduinoで距離を測る(1)【超音波測距センサ with XBee】 [Arduino]
一旦、それなりにRC戦車のベーシック部分ができたので、これからの応用編に向けて、基礎知識(ネタ?)も集めます。
Arduinoで距離を測ります!
このネタって、まぁネットで検索すれば、ここより100倍は良いサイトがあちこちにあるので、別にここで取り上げる必要も無いんだけど、自分の備忘録なんで。。。
最初は、超音波測距センサを取り上げます。よくロボットとかの目のように見える部分ですね。
それで使うのは、超音波測距センサの「SEN136B5B」です。
これも買ってから一度も使う間もなくディスコン?になってしまったようで、ネットで探しても在庫が見当たりません。。。物持ちがいいのも考えものです。
これです↓
超音波距離センサモジュール 3cm-4m

"https://www.switch-science.com/catalog/795/"
ただ、単純にArduinoに繋げてスケッチで動かして※、というのも少し面白みがないので、今後への応用のために取得したデータをXBeeで無線伝送しPCのシリアルモニタで表示できるようにしたいと思います。
※"https://www.arduino.cc/en/tutorial/ping"
【配線図】
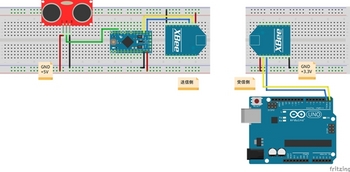
今回、受信側はArduino UNO(以下UNO)とXBeeを使います。UNOとXBeeとの接続には、配線図ではうまく表現できなかったのですが、XBeeシールドを使いたいと思います。
KKHMF XBeeシールド V03 モジュール 拡張ボード Bluetooth対応 Arduino用
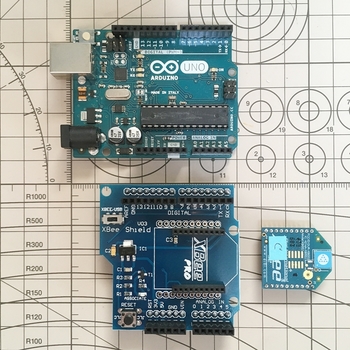
"https://www.amazon.co.jp/gp/product/B07SN3YHZF/ref=ppx_yo_dt_b_asin_title_o02_s00?ie=UTF8&psc=1"
中華製ですね。値段が安いのが決め手でした。
XBeeの確認をします。このときUNOはただPCとXBeeをつなぐ基板として使います。
最初、UNOに何も載せないでPCに接続します。
Arduino IDEを立ち上げて、
メニュー> スケッチ例>01.Basics>BareMinimum
でUNOに書き込みます。
書き込みが終わったら、UNOをPCから取り外します。
シールドにはスイッチがついています。XBeeがやり取りする相手に合わせて切り替えます。
USB:PC(USB接続)⇔XBee
XBEE:UNO⇔XBee
しっかし、表示に統一感がないので分かりにくいですねー。XBeeから見ての接続先を表示するなら、下段はXBEEでなくてUNOだと思うんですけどね。未だにどっちがどっちだか分からなく時があります。。。
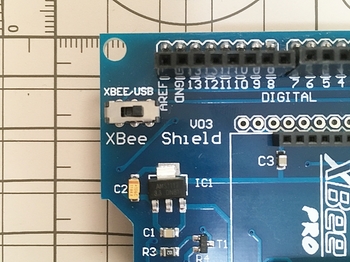
今回は、PCとXBeeで直接やり取りするので、シールドのスイッチを「USB」側にします。
シールドをUNOに載せ、PCに接続します。
XCTUを立ち上げて、XBeeモジュールを認識できればOKです。
改めてスケッチを書き込む場合には、いったんUNOをPCから取り外し、シールドも外します。
再度UNOをPCに接続しArduino IDEを起動してから、受信側のスケッチを書き込みます。
Arduinoで距離を測ります!
このネタって、まぁネットで検索すれば、ここより100倍は良いサイトがあちこちにあるので、別にここで取り上げる必要も無いんだけど、自分の備忘録なんで。。。
最初は、超音波測距センサを取り上げます。よくロボットとかの目のように見える部分ですね。
それで使うのは、超音波測距センサの「SEN136B5B」です。
これも買ってから一度も使う間もなくディスコン?になってしまったようで、ネットで探しても在庫が見当たりません。。。物持ちがいいのも考えものです。
これです↓
超音波距離センサモジュール 3cm-4m

"https://www.switch-science.com/catalog/795/"
ただ、単純にArduinoに繋げてスケッチで動かして※、というのも少し面白みがないので、今後への応用のために取得したデータをXBeeで無線伝送しPCのシリアルモニタで表示できるようにしたいと思います。
※"https://www.arduino.cc/en/tutorial/ping"
【配線図】
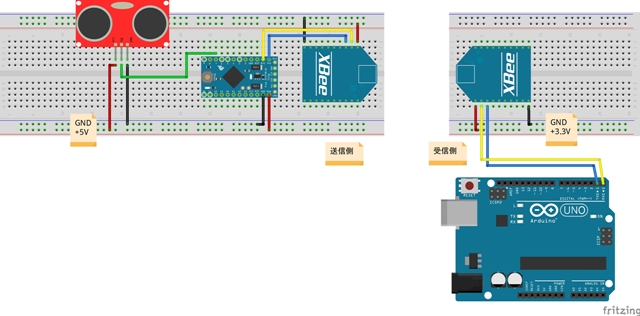
今回、受信側はArduino UNO(以下UNO)とXBeeを使います。UNOとXBeeとの接続には、配線図ではうまく表現できなかったのですが、XBeeシールドを使いたいと思います。
KKHMF XBeeシールド V03 モジュール 拡張ボード Bluetooth対応 Arduino用
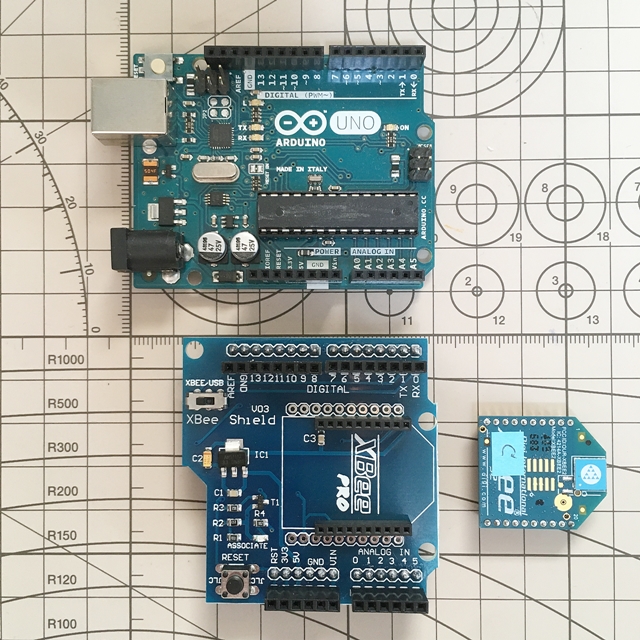
"https://www.amazon.co.jp/gp/product/B07SN3YHZF/ref=ppx_yo_dt_b_asin_title_o02_s00?ie=UTF8&psc=1"
中華製ですね。値段が安いのが決め手でした。
XBeeの確認をします。このときUNOはただPCとXBeeをつなぐ基板として使います。
最初、UNOに何も載せないでPCに接続します。
Arduino IDEを立ち上げて、
メニュー> スケッチ例>01.Basics>BareMinimum
でUNOに書き込みます。
書き込みが終わったら、UNOをPCから取り外します。
シールドにはスイッチがついています。XBeeがやり取りする相手に合わせて切り替えます。
USB:PC(USB接続)⇔XBee
XBEE:UNO⇔XBee
しっかし、表示に統一感がないので分かりにくいですねー。XBeeから見ての接続先を表示するなら、下段はXBEEでなくてUNOだと思うんですけどね。未だにどっちがどっちだか分からなく時があります。。。

今回は、PCとXBeeで直接やり取りするので、シールドのスイッチを「USB」側にします。
シールドをUNOに載せ、PCに接続します。
XCTUを立ち上げて、XBeeモジュールを認識できればOKです。
改めてスケッチを書き込む場合には、いったんUNOをPCから取り外し、シールドも外します。
再度UNOをPCに接続しArduino IDEを起動してから、受信側のスケッチを書き込みます。



