Arduinoで距離を測る(1)【超音波測距センサ with XBee(動作確認)】 [Arduino]
前回で2byteのシリアル通信ができたので、本番です。
測定した距離をバイナリデータとしてXBee間でシリアル通信して、PCのシリアルモニタに表示をさせます。
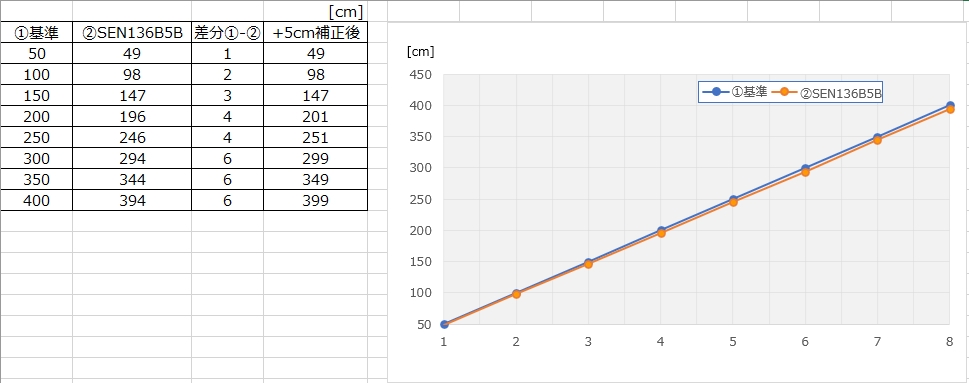
一度実測した値をもとに、誤差を修正するための補正値を組み入れました。
補正値を入れる前後の実績値を示します。
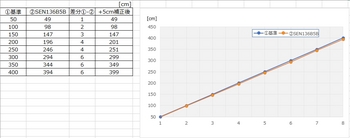
超音波測距センサの「SEN136B5B」の測定レンジは3cm~4m(400cm)ですので、測定レンジを外れたら"Out of Range"と表示します。
【スケッチ】
<送信側>
<受信側>
これで遠隔から距離データを取得することができました。
同じプログラムを使い回せば、他にも温度センサからのデータだったりとか、いろいろと応用できそうです。

測定した距離をバイナリデータとしてXBee間でシリアル通信して、PCのシリアルモニタに表示をさせます。
一度実測した値をもとに、誤差を修正するための補正値を組み入れました。
補正値を入れる前後の実績値を示します。
超音波測距センサの「SEN136B5B」の測定レンジは3cm~4m(400cm)ですので、測定レンジを外れたら"Out of Range"と表示します。
【スケッチ】
<送信側>
/*******************************************************************************
超音波測距センサ(SEN136B5B)用XBeeトランスミッタ
++++++ note ++++++
超音波測距センサ(SEN136B5B)用にArduinoUNO-XBee送信機
*******************************************************************************/
// this constant won't change. It's the pin number of the sensor's output:
const int pingPin = 7;
// 初期化(電源投入/リセット時1回のみ実行):
void setup() {
Serial.begin(9600); //9600bpsでシリアルポートを開く
}
// main loop:
void loop() {
long duration; //変数を定義
int cm; //変数を定義
// The PING))) is triggered by a HIGH pulse of 2 or more microseconds.
// モジュールに超音波発信のためのトリガーを与える
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
pinMode(pingPin, OUTPUT); //pingPinを出力ピンに定義
digitalWrite(pingPin, LOW); //LOW出力
delayMicroseconds(2); //2us停止
digitalWrite(pingPin, HIGH); //HIGH出力
delayMicroseconds(5); //5us停止
digitalWrite(pingPin, LOW); //LOW出力
/*
①トリガー信号により40kHzの超音波パルスをモジュールは発信する。
②超音波パルス発信中に、pingPinを出力→入力ピンに変更する。
②超音波パルスを発信し終えたら、pinPinはHIGHに遷移する(超音波パルスをモジュールが受信する
間HIGHを継続(受信したらLOWに遷移))。
④pinPinのHIGH継続時間を測定することで、距離に変換することができる。
*/
// The same pin is used to read the signal from the PING))): a HIGH pulse
// whose duration is the time (in microseconds) from the sending of the ping
// to the reception of its echo off of an object.
pinMode(pingPin, INPUT); //pingPinを入力ピンに定義
duration = pulseIn(pingPin, HIGH); //pingPinがHIGHになっている時間(パルスの長さ)を計測する
// convert the time into a distance
cm = microsecondsToCentimeters(duration); //パルスの長さ(時間)を距離(センチ)に変換
sendIntData(cm);
delay(100); //シリアルポートを溢れさせないように ※delay():単位ms
}
//パルスの長さ(時間)を距離(センチ)に変換する関数
long microsecondsToCentimeters(long microseconds) {
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the object we
// take half of the distance travelled.
return microseconds / 29 / 2;
}
// int型のデータを送信する関数
void sendIntData(int value) {
Serial.write('H'); // ヘッダの送信
Serial.write(lowByte(value)); // 下位バイトの送信
Serial.write(highByte(value)); // 上位バイトの送信
}
<受信側>
/*******************************************************************************
超音波測距センサ(SEN136B5B)用XBeeレシーバ
++++++ note ++++++
超音波測距センサ(SEN136B5B)用にArduinoUNO-XBee受信機
・実測データより受信データが195以上(約2m)には+5cmの補正を加える
・距離データが3(約3cm)未満又は400(約4m)を超えたら、Out of Rangeと表示する
*******************************************************************************/
#define VERSION "1.00a0"
#define hosei 5; //補正値(実測データより求めた)
int recv_data; //受信データ
int range_data; //距離データ
// 初期化(電源投入/リセット時1回のみ実行):
void setup() {
Serial.begin(9600); //9600bpsでシリアルポートを開く
}
// main loop:
void loop(){
// 受信バッファに3バイト(ヘッダ+int)以上のデータが着ているか確認
if ( Serial.available() >= sizeof('H') + sizeof(int) ) {
// ヘッダの確認
if ( Serial.read() == 'H' ){
int low = Serial.read(); //下位バイトの読み取り
int high = Serial.read(); //上位バイトの読み取り
recv_data = makeWord(high,low); //上位バイトと下位バイトを合体させてint型データを復元
// 受信データから表示させる距離データを作成
if(recv_data >= 195){ //195以上ならば補正値を加算する
range_data = recv_data + hosei;
}
else{
range_data = recv_data;
}
// 距離データの表示 range_dataの値をハード・シリアルへ出力する(Arduino→PCモニタ)
if((range_data >= 3) && (range_data <= 400)){ //range_dataが3以上400以下ならば、距離を表示する
Serial.print("Range= ");
Serial.print(range_data);
Serial.println("[cm]");
}
else{ //range_dataがそれ以外ならば、Out of Rangeと表示する
Serial.println("Out of Range");
}
}
}
}
これで遠隔から距離データを取得することができました。
同じプログラムを使い回せば、他にも温度センサからのデータだったりとか、いろいろと応用できそうです。
2020-07-24 10:03
nice!(0)
コメント(0)




コメント 0