リモートコントロール(RC)戦車をつくる【XBeeコントロール送信機③】 [RC戦車]
XBeeコントロール送信機の送信回路部を作製します。
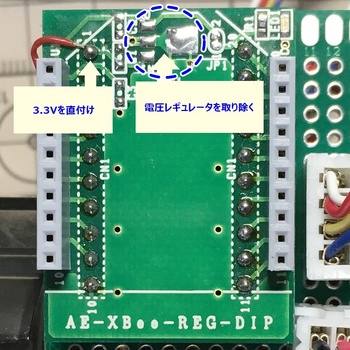
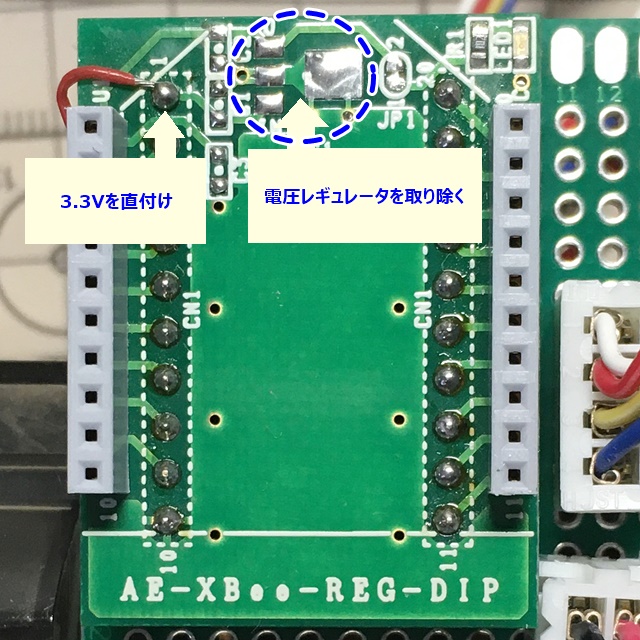
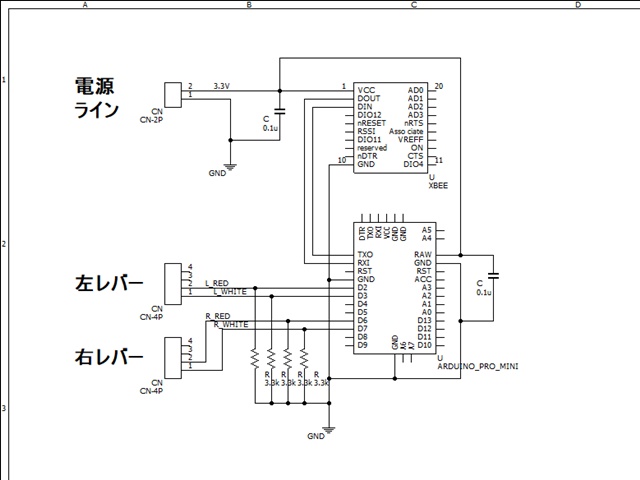
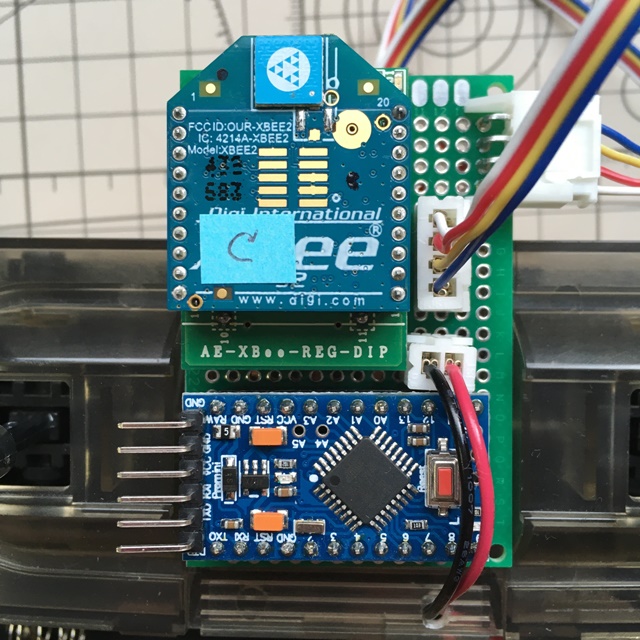
XBeeはリモコンボックスの電源回路から3.3Vを印加できるので、XBee用2.54mmピッチ変換基板("http://akizukidenshi.com/catalog/g/gP-05060/")の電圧レギュレータを取り除いて、直付けします。
Arduino Pro MiniとXBeeは24ピンDIPソケットで実装しています。
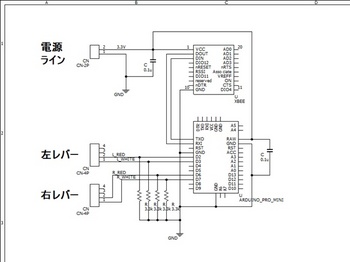
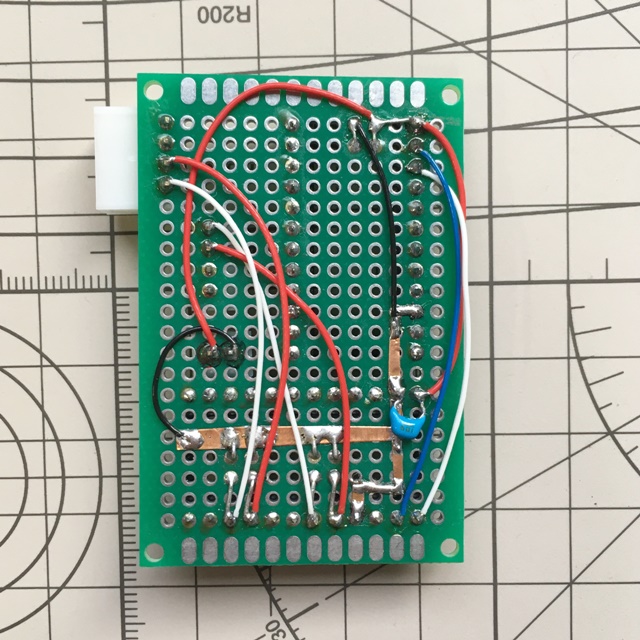
コネクタは電源とGNDで2ピン、ジョイスティックからの信号用を4ピンコネクタとしました。
ジョイスティックのレバーが中立(ニュートラル)の状態では、モータを停止状態にしてRC戦車をしっかりと停めたいわけですが、電気的にオープン(どこにも繋がっていない状態)のようですので、このままでは電圧がフラフラしてしまいます。そこで、Arduinoのジョイスティックからの入力信号ピンを33kΩの抵抗を介してGNDに接続しています(プルダウン抵抗)。これでジョイスティックがニュートラル時でも入力ピンの値をLOWに確定できます。
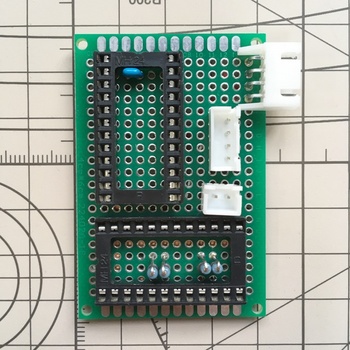
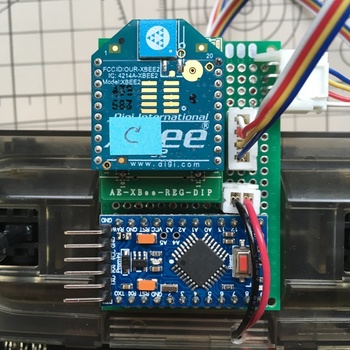
【基盤実装】
・Top view
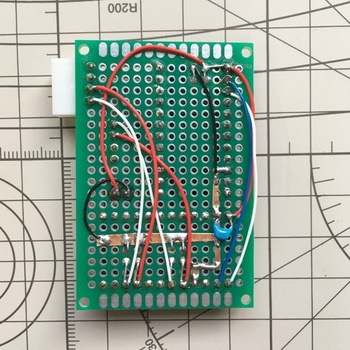
・Bottom view
【回路図】
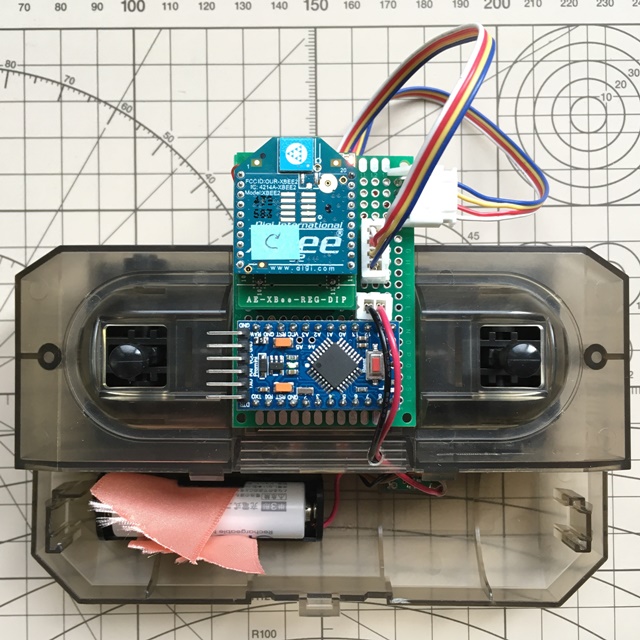
【組み立て】
【スケッチ】

XBeeはリモコンボックスの電源回路から3.3Vを印加できるので、XBee用2.54mmピッチ変換基板("http://akizukidenshi.com/catalog/g/gP-05060/")の電圧レギュレータを取り除いて、直付けします。
Arduino Pro MiniとXBeeは24ピンDIPソケットで実装しています。
コネクタは電源とGNDで2ピン、ジョイスティックからの信号用を4ピンコネクタとしました。
ジョイスティックのレバーが中立(ニュートラル)の状態では、モータを停止状態にしてRC戦車をしっかりと停めたいわけですが、電気的にオープン(どこにも繋がっていない状態)のようですので、このままでは電圧がフラフラしてしまいます。そこで、Arduinoのジョイスティックからの入力信号ピンを33kΩの抵抗を介してGNDに接続しています(プルダウン抵抗)。これでジョイスティックがニュートラル時でも入力ピンの値をLOWに確定できます。
【基盤実装】
・Top view
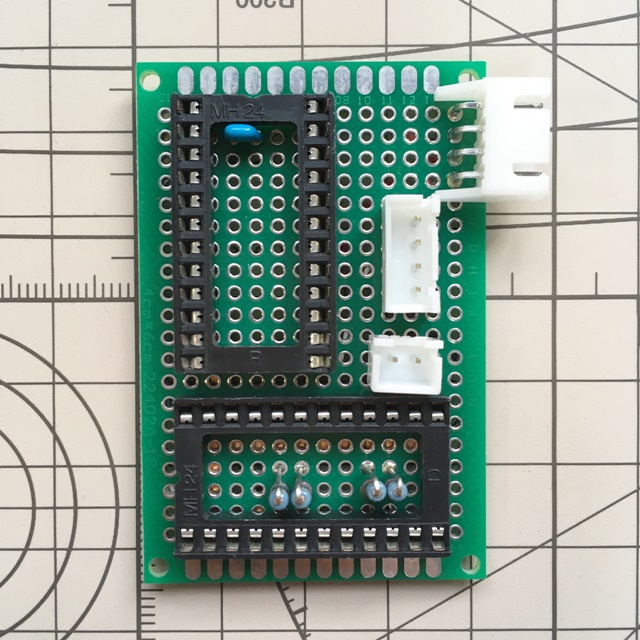
・Bottom view
【回路図】
【組み立て】
【スケッチ】
/******************************************************************************* XBeeコントロール送信機 ++++++ note ++++++ ・ジョイスティックの方向と出力値のマッピング 7 8 9↑
4 ← 5 → 6
↓
1 2 3 *******************************************************************************/ #define VERSION "1.00a0" const int L_RED = 2; const int L_WHITE = 3; const int R_RED = 6; const int R_WHITE = 7; // 初期化(電源投入/リセット時1回のみ実行): void setup() { // initialize the remote_box signal pin as an input //(Arduinoにリモコンボックスからのピンが入力であることを伝える) pinMode(L_RED, INPUT); pinMode(L_WHITE, INPUT); pinMode(R_RED, INPUT); pinMode(R_WHITE, INPUT); Serial.begin(9600); //9600bpsでシリアルポートを開く } // main loop: void loop() { if((digitalRead(L_RED) == HIGH)&(digitalRead(R_RED) == HIGH)){ //前進 Serial.print('8'); delay(100); //シリアルポートを溢れさせないように ※delay():単位ms } else if((digitalRead(L_RED) == HIGH)&(digitalRead(R_WHITE) == HIGH)){ //右超信地旋回 Serial.print('6'); delay(100); //シリアルポートを溢れさせないように ※delay():単位ms } else if((digitalRead(L_WHITE) == HIGH)&(digitalRead(R_RED) == HIGH)){ //左超信地旋回 Serial.print('4'); delay(100); //シリアルポートを溢れさせないように ※delay():単位ms } else if((digitalRead(L_WHITE) == HIGH)&(digitalRead(R_WHITE) == HIGH)){ //後進 Serial.print('2'); delay(100); //シリアルポートを溢れさせないように ※delay():単位ms } else if(digitalRead(L_RED) == HIGH){ //右前進緩旋回 Serial.print('9'); delay(100); //シリアルポートを溢れさせないように ※delay():単位ms } else if(digitalRead(R_RED) == HIGH){ //左前進緩旋回 Serial.print('7'); delay(100); //シリアルポートを溢れさせないように ※delay():単位ms } else if(digitalRead(L_WHITE) == HIGH){ //右後進緩旋回 Serial.print('3'); delay(100); //シリアルポートを溢れさせないように ※delay():単位ms } else if(digitalRead(R_WHITE) == HIGH){ //左後進緩旋回 Serial.print('1'); delay(100); //シリアルポートを溢れさせないように ※delay():単位ms } else{ Serial.print('5'); //中立ニュートラル(Stop) delay(100); //シリアルポートを溢れさせないように ※delay():単位ms } }
リモートコントロール(RC)戦車をつくる【ミスったー。。。】 [RC戦車]
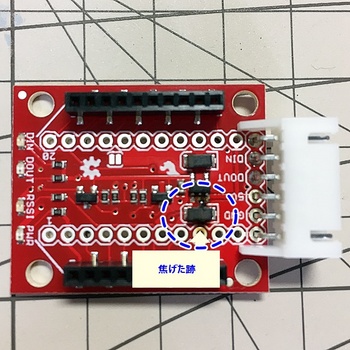
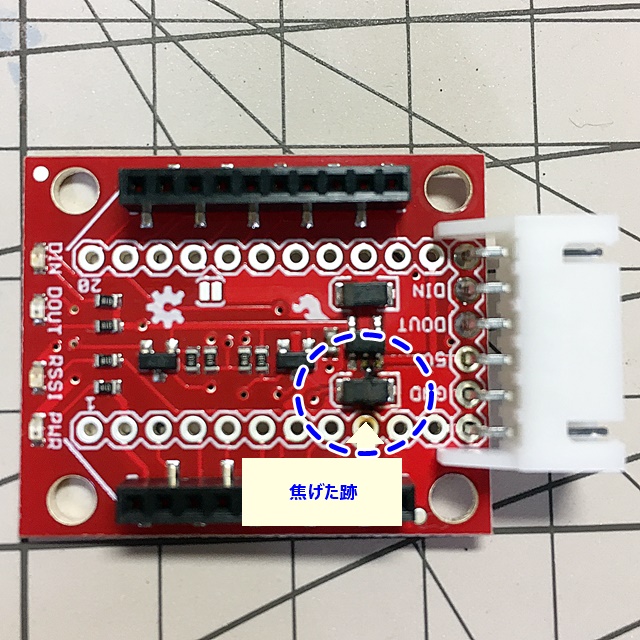
やっちゃいましたー、プラスとマイナスの逆挿し!
見事にショートです。 orz
もちろん、注意していたつもりなんですけどねー。ちょっと手元が暗かったかなー?
ジャンパー線の赤と黒、交差にもなっていたので、見誤って挿しちゃいましたね。
すぐに白煙が上がって、焼けた臭いが凄いです。
損害は、
・XBee × 2
・XBee3.3V⇔5V変換アダプタ × 1
XBeeは”s2"という販売終了品を使っていたので、片方がダメになったらペアで不用品となってしまいました。せっかく利活用出来ていたのに、残念です。。。
XBee3.3V⇔5V変換アダプタは、RC戦車搭載のArduino Pro Miniとモータドライバが5V仕様なので、XBeeとの接続するために準備したものでした。作成記事を書く前に召されてしまいましたね。。。
XBeeエクスプローラ5Vマイコン用
"https://www.switch-science.com/catalog/1166/"
XBeeとXBeeの変換アダプタは買い直さないとダメだから、大体6,000円強ですかね、被害総額は。。。
注意一秒、6,000円ですね。
#後日、XCTUでXBeeにアクセスしたところ、設定値とか読み出せたので壊れていなかったようです。買い直しもXBeeの変換アダプタだけで済んだので、よかったです。次は失敗しないように、電源を入れる前には念入り確認ですね。
見事にショートです。 orz
もちろん、注意していたつもりなんですけどねー。ちょっと手元が暗かったかなー?
ジャンパー線の赤と黒、交差にもなっていたので、見誤って挿しちゃいましたね。
すぐに白煙が上がって、焼けた臭いが凄いです。
損害は、
・XBee3.3V⇔5V変換アダプタ × 1
XBee3.3V⇔5V変換アダプタは、RC戦車搭載のArduino Pro Miniとモータドライバが5V仕様なので、XBeeとの接続するために準備したものでした。作成記事を書く前に召されてしまいましたね。。。
XBeeエクスプローラ5Vマイコン用
"https://www.switch-science.com/catalog/1166/"
#後日、XCTUでXBeeにアクセスしたところ、設定値とか読み出せたので壊れていなかったようです。買い直しもXBeeの変換アダプタだけで済んだので、よかったです。次は失敗しないように、電源を入れる前には念入り確認ですね。
リモートコントロール(RC)戦車をつくる【XBeeコントロール送信機②】 [RC戦車]
------------------------------------------------------------------------
【トピックス】2020年5月。前回更新から約4ヶ月程度経ちました。その間に世界中で新型コロナウイルスの感染が広がり、日本でも”緊急事態宣言”が出されて極端な外出自粛となっています。そのため、この今年のGWは「ステイホーム週間」として家に留まることを強く要請され、観光や繁華街の人通りもまばらとなり、経済にも大きな影を落としています。たとえ感染拡大が落ち着いたとしても今まで通りの生活に戻ることはなく、ウイルスとの共生を前提とした新しいライフスタイルを模索していくことになる、と言われています。
------------------------------------------------------------------------
一応、送信機の方針は決めたのですが、レイアウトや実装をどのようにするか?は別問題です。
配置に失敗してもそう簡単には一からやり直すことができませんので、ここでのアイデアを慎重にまとめるため、多くの時間がかかっています。。。
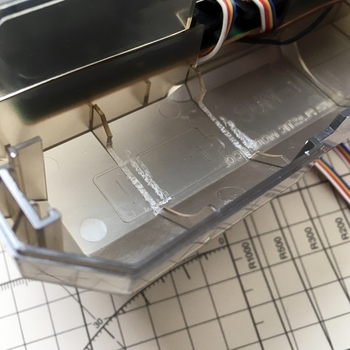
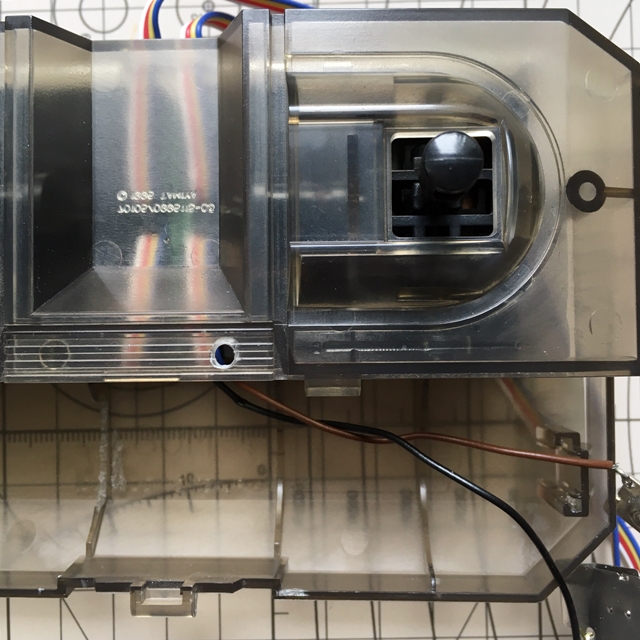
単三電池ケースをリモコンボックスの電池ケース内に入れたいので、リューターでプラスチックの出っ張りを削っていきます。
リモコンボックスからの電源ラインを外へ引き出すため、ドリルで穴を開けました。φ3mmです。
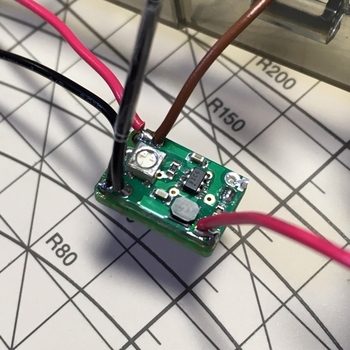

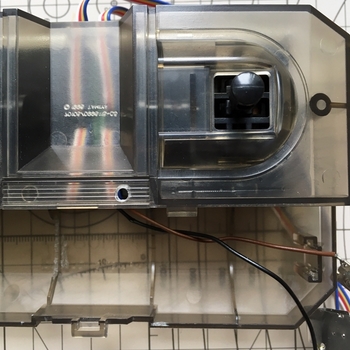
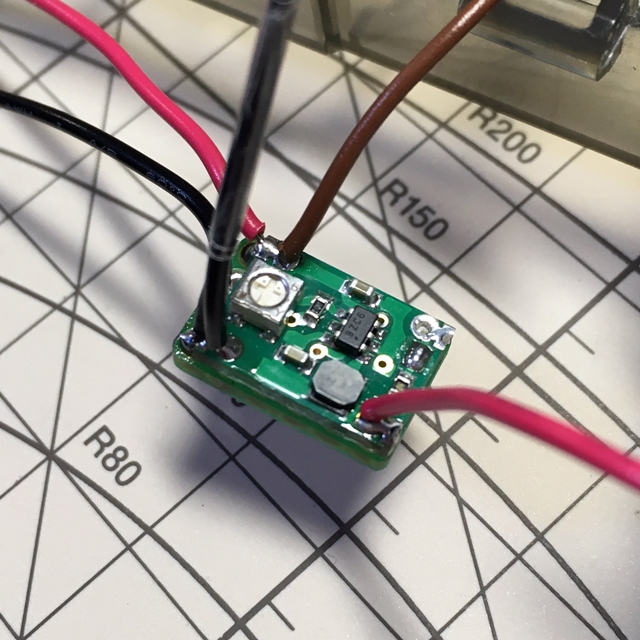
昇圧回路を結線します。昇圧回路はミニユニバーサル基板の上に載せて、単三電池ケースからのラインとジョイスティックへの電源ライン、あと先ほどのドリルで開けた穴を通すXBeeとArduino用の電源ラインを結線します。
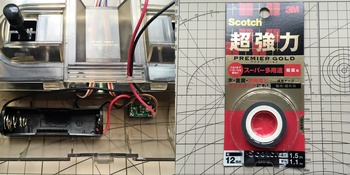
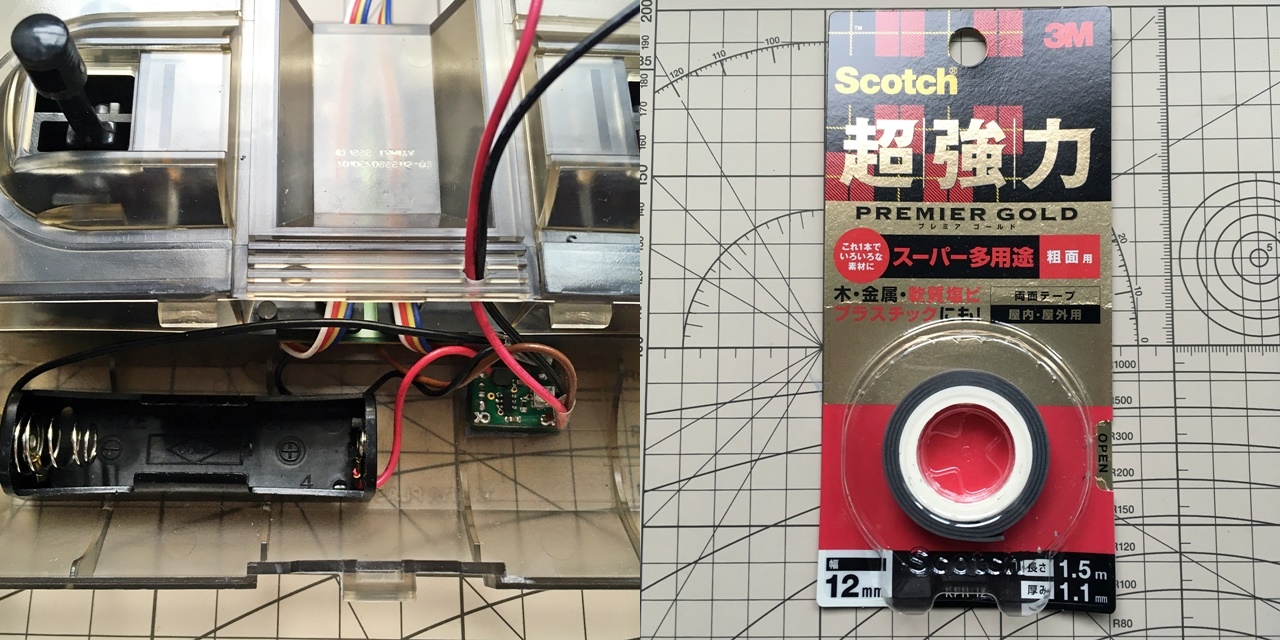
リモコンボックス内に単三電池と昇圧回路を両面テープ(超強力タイプ)で取り付けます。
テープ基材がクッションのようで柔らかいので多少のでこぼこは吸収してくれて、なかなかいい感じです。
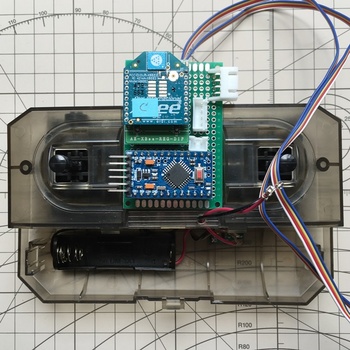
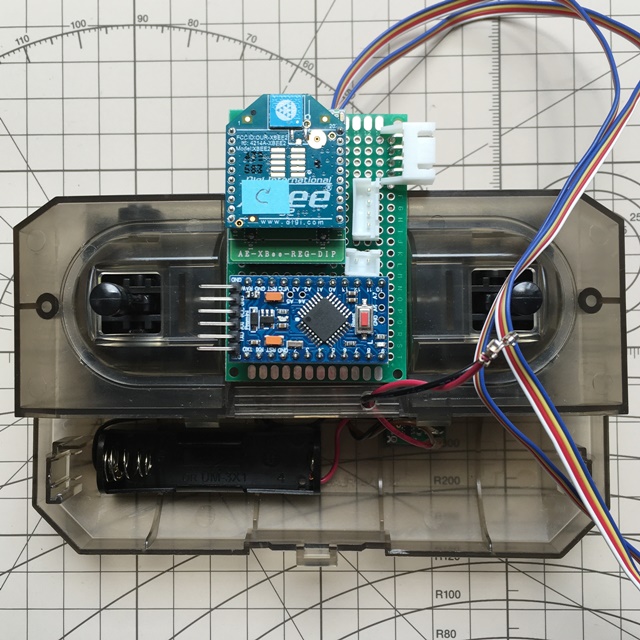
次に、XBeeとArduino、コネクタの部位配置を検討しています。
下に見えるユニバーサル基板が、リモコンボックスの外側で搭載するのにちょうど良い大きさなので、このまま使用するとして、キツキツの実装になりました。
【トピックス】2020年5月。前回更新から約4ヶ月程度経ちました。その間に世界中で新型コロナウイルスの感染が広がり、日本でも”緊急事態宣言”が出されて極端な外出自粛となっています。そのため、この今年のGWは「ステイホーム週間」として家に留まることを強く要請され、観光や繁華街の人通りもまばらとなり、経済にも大きな影を落としています。たとえ感染拡大が落ち着いたとしても今まで通りの生活に戻ることはなく、ウイルスとの共生を前提とした新しいライフスタイルを模索していくことになる、と言われています。
------------------------------------------------------------------------
一応、送信機の方針は決めたのですが、レイアウトや実装をどのようにするか?は別問題です。
配置に失敗してもそう簡単には一からやり直すことができませんので、ここでのアイデアを慎重にまとめるため、多くの時間がかかっています。。。
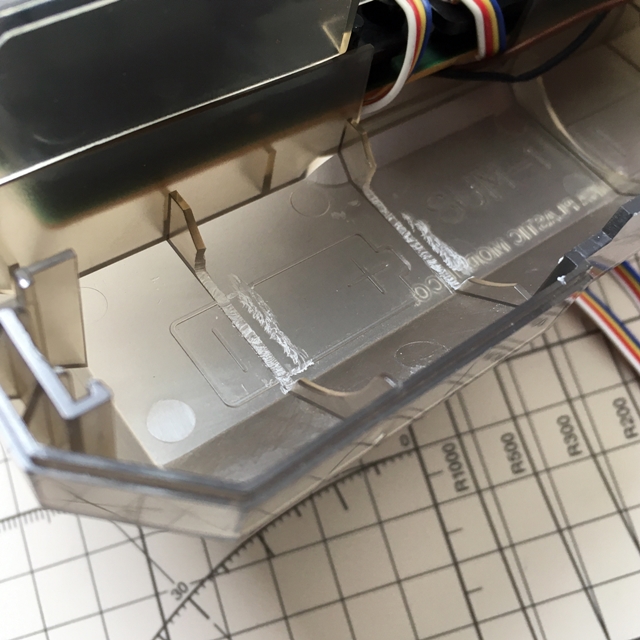
単三電池ケースをリモコンボックスの電池ケース内に入れたいので、リューターでプラスチックの出っ張りを削っていきます。
リモコンボックスからの電源ラインを外へ引き出すため、ドリルで穴を開けました。φ3mmです。

昇圧回路を結線します。昇圧回路はミニユニバーサル基板の上に載せて、単三電池ケースからのラインとジョイスティックへの電源ライン、あと先ほどのドリルで開けた穴を通すXBeeとArduino用の電源ラインを結線します。
リモコンボックス内に単三電池と昇圧回路を両面テープ(超強力タイプ)で取り付けます。
テープ基材がクッションのようで柔らかいので多少のでこぼこは吸収してくれて、なかなかいい感じです。
次に、XBeeとArduino、コネクタの部位配置を検討しています。
下に見えるユニバーサル基板が、リモコンボックスの外側で搭載するのにちょうど良い大きさなので、このまま使用するとして、キツキツの実装になりました。



