リモートコントロール(RC)戦車をつくる【モータとドライバ】 [RC戦車]
こどもの頃、プラモデルを作ったときにお世話になった”マブチモータ”。乾電池2本でお手軽に動かすことができるのですが、専攻が機械系でもなかったのでモータの動作ってあまりに気にしたことがなかったんですね。今回せっかくの機会なので一通りの理解をしておこうと思います。
と、言ってもモータのネタはググれば、それこそ山ほど出てきますので(笑)、詳細はそちらへお任せするとして自分なりにデータシートと実験で得られたノウハウをまとめていきます。
【使うモータ】
ダブルギヤボックスに付属しているモータは『FA-130RA(-2270)』で、工作で使うとしたら”まず、これ!”というくらい最もポピュラーなモータですね。
これ↓です。

"https://product.mabuchi-motor.co.jp/detail.html?id=9"
趣味ベースで動かすのであれば、
使用電圧範囲:1.5~3V(やっぱり乾電池2本だ)
適正電圧:1.5V
消費電流:500mA
くらいを押させておけば、とりあえず壊さない程度でOKだと思います。
【モータドライバ】
モータを動かすのにモータドライバが必要となってきます。
必要かどうかはその人がどこまで自作で頑張れるか?にもよるので、本当は”あると便利♪”というのが正しい表現なのかもしれません。が、今さら2個300円で買えるものをわざわざ自作することもないでしょうから”あると便利なものだけど今となっては必要なもの”という、こんがらがってしまってよくわからないリード文になってしまいました。
ごめんね、いい加減で。。。(笑)
で、端的に言うと
・ロジックICの出力をそのままモータにつないでも、ICからはたくさんの電流を流せないので
モータは動きません。
・モータに流れる電流のプラスマイナスを制御することで、回る向きを正転、反転と制御したい。
ということを解決するための専用ICが”モータドライバ”です。
これ↓です。
東芝セミコンダクター社 DCモーター用フルブリッジドライバ(正・逆切り替えドライバ)
.JPG)
"http://akizukidenshi.com/catalog/g/gI-02001/"
"https://toshiba.semicon-storage.com/jp/product/linear/motordriver/detail.TA7291P.html"
2018年5月現在、TA7291Pは『生産終了予定』となっていて、データシートにも”Not Recommended for New Design"となっていますが、流通在庫だけでも十分あると思うので、当面は大丈夫だと思います。
【特性実験】
モータドライバとモータを接続して動作特性を調べてみます。理由はRC戦車のスピードを可変にしたいと思っているので、制御電圧(Vref)を変化させた時のモータ側への出力電圧(Vout)の変化を見るためです。
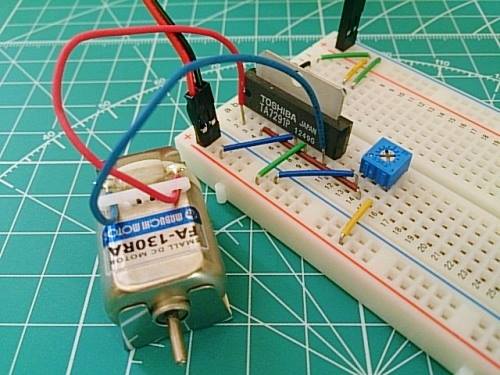
だんだん大げさなことになってきましたが、最近ではブレッドボードに挿すだけで回路が組めるので、気軽に試すことができます。
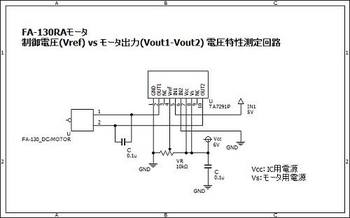
【特性測定回路図】
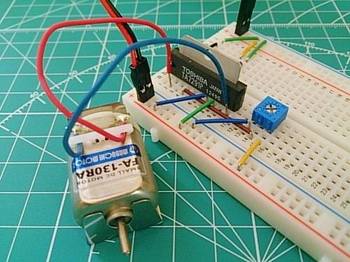
【ブレッドボードへの実装の様子】
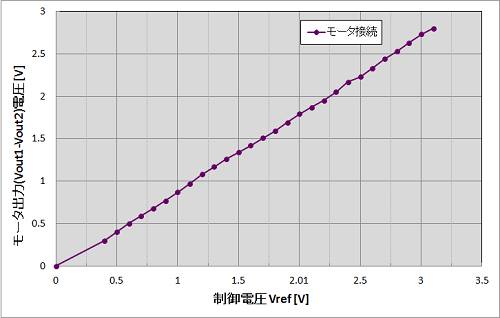
モータの使用電圧範囲は1.5~3.0Vなので、Vrefも1.7~3V位で変化させれば良さそうです。しかし2Vを超えたあたりから音と振動がかなり多くなり少しヤバそうなので、実際にはスピードを可変に出来る領域はあまり大きくないのかもしれません。また、今回はモータには無負荷状態での基礎特性なので、実際にはキャタピラで動作したときの負荷状態でVrefのチューニングが必要かもしれません。
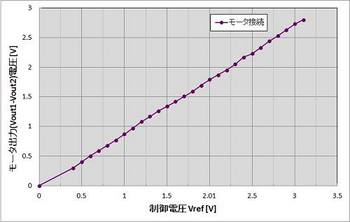
【測定結果グラフ】

と、言ってもモータのネタはググれば、それこそ山ほど出てきますので(笑)、詳細はそちらへお任せするとして自分なりにデータシートと実験で得られたノウハウをまとめていきます。
【使うモータ】
ダブルギヤボックスに付属しているモータは『FA-130RA(-2270)』で、工作で使うとしたら”まず、これ!”というくらい最もポピュラーなモータですね。
これ↓です。

"https://product.mabuchi-motor.co.jp/detail.html?id=9"
趣味ベースで動かすのであれば、
使用電圧範囲:1.5~3V(やっぱり乾電池2本だ)
適正電圧:1.5V
消費電流:500mA
くらいを押させておけば、とりあえず壊さない程度でOKだと思います。
【モータドライバ】
モータを動かすのにモータドライバが必要となってきます。
必要かどうかはその人がどこまで自作で頑張れるか?にもよるので、本当は”あると便利♪”というのが正しい表現なのかもしれません。が、今さら2個300円で買えるものをわざわざ自作することもないでしょうから”あると便利なものだけど今となっては必要なもの”という、こんがらがってしまってよくわからないリード文になってしまいました。
ごめんね、いい加減で。。。(笑)
で、端的に言うと
・ロジックICの出力をそのままモータにつないでも、ICからはたくさんの電流を流せないので
モータは動きません。
・モータに流れる電流のプラスマイナスを制御することで、回る向きを正転、反転と制御したい。
ということを解決するための専用ICが”モータドライバ”です。
これ↓です。
東芝セミコンダクター社 DCモーター用フルブリッジドライバ(正・逆切り替えドライバ)
.JPG)
"http://akizukidenshi.com/catalog/g/gI-02001/"
"https://toshiba.semicon-storage.com/jp/product/linear/motordriver/detail.TA7291P.html"
2018年5月現在、TA7291Pは『生産終了予定』となっていて、データシートにも”Not Recommended for New Design"となっていますが、流通在庫だけでも十分あると思うので、当面は大丈夫だと思います。
【特性実験】
モータドライバとモータを接続して動作特性を調べてみます。理由はRC戦車のスピードを可変にしたいと思っているので、制御電圧(Vref)を変化させた時のモータ側への出力電圧(Vout)の変化を見るためです。
だんだん大げさなことになってきましたが、最近ではブレッドボードに挿すだけで回路が組めるので、気軽に試すことができます。
【特性測定回路図】

【ブレッドボードへの実装の様子】
モータの使用電圧範囲は1.5~3.0Vなので、Vrefも1.7~3V位で変化させれば良さそうです。しかし2Vを超えたあたりから音と振動がかなり多くなり少しヤバそうなので、実際にはスピードを可変に出来る領域はあまり大きくないのかもしれません。また、今回はモータには無負荷状態での基礎特性なので、実際にはキャタピラで動作したときの負荷状態でVrefのチューニングが必要かもしれません。
【測定結果グラフ】
リモートコントロール(RC)戦車をつくる【モータにリード線を接続】 [RC戦車]
モータにリード線を接続していきます。リード線にはこれ↓を使用しています。
サンコー電商 UL1007 AWG26 L-2×10色 電線 - 千石電商

"https://www.sengoku.co.jp/mod/sgk_cart/detail.php?code=EEHD-0T45"
リード線の外皮を10~12mmで剥いて、端子に巻きつけてハンダ付けをします。
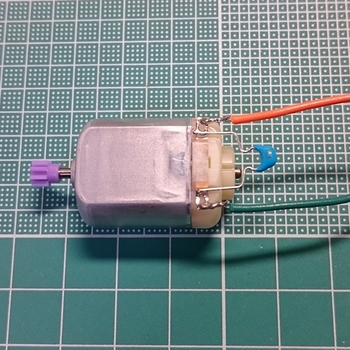
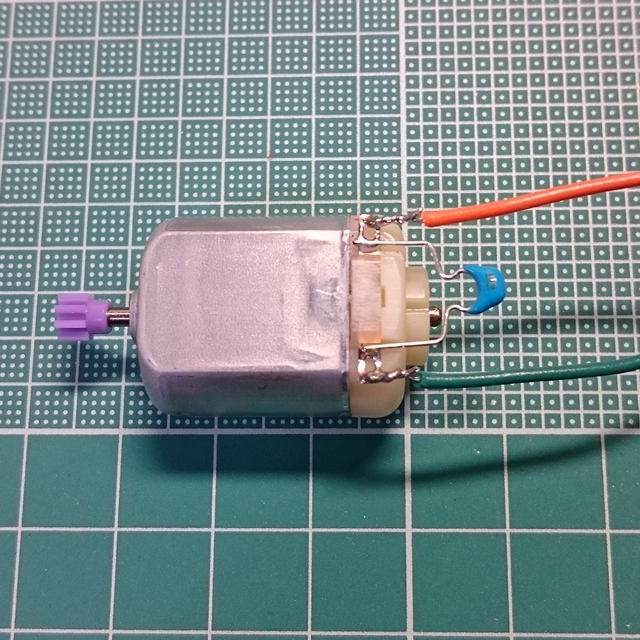
ノイズ除去のためのコンデンサ(0.1μF)も一緒に付けます。
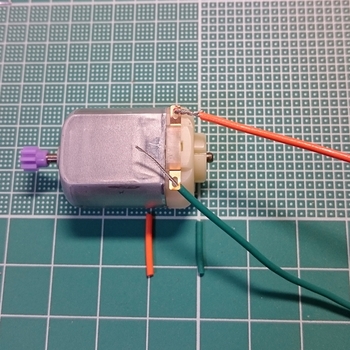
コンデンサの足が少し長いのは、ギヤボックスとモータを固定するツメを避けるスペースを空けているからです。
リード線のモータの反対側は、基板との取り外しが可能なようにコネクタを付けることにします。
圧着コネクタの自作方法については下記のページが参考になりました。
-----------------------------------------------------------------------------
電子うさぎ
コネクタの自作!電子工作の圧着工具と圧着方法
"https://xn--p8jqu4215bemxd.com/archives/397"
-----------------------------------------------------------------------------
日本圧着端子製造 (JST) XHコネクタ ハウジング2P XHP-2 - 千石電商
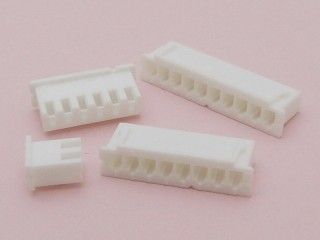
"https://www.sengoku.co.jp/mod/sgk_cart/detail.php?code=7AN6-5SFL"
日本圧着端子製造 (JST) XHコネクタ ハウジング用コンタクト バラ BXH-001T-P0.6 - 千石電商

"https://www.sengoku.co.jp/mod/sgk_cart/detail.php?code=2AR6-5SFL"
圧着工具があると便利なのですが、あいにく手元にないので先細のペンチでかしめていきます。
リード線の被膜を2mm程度剥いてコンタクト(金具)に挿入しますが、
その際に押し込み過ぎると、最後にコネクタ同士が嵌合出来なくなるので注意が必要です。
(これで1回目は失敗しました。。。)
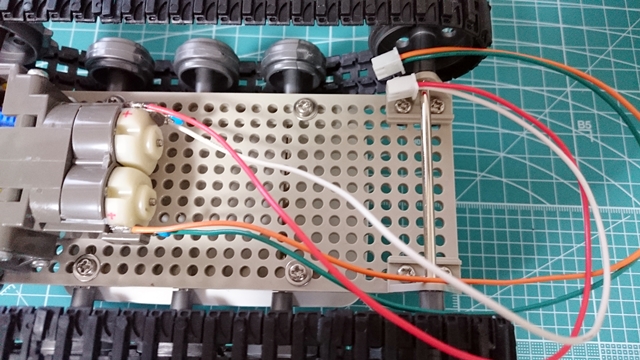
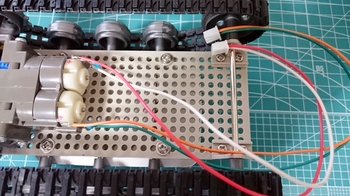
2個のモータにリード線を接続できました。
リード線の長さは一応、取り回しも考慮して25cmとしましたが、車体をぐるっと取回すケースもあるので40cmくらいあっても(半分の長さで20cmですから)良かったかもしれないとちょっと不安になっています。。。
まぁ、短かったら、そのときはそのときで途中で切って延長しましょう。
サンコー電商 UL1007 AWG26 L-2×10色 電線 - 千石電商

"https://www.sengoku.co.jp/mod/sgk_cart/detail.php?code=EEHD-0T45"
リード線の外皮を10~12mmで剥いて、端子に巻きつけてハンダ付けをします。
ノイズ除去のためのコンデンサ(0.1μF)も一緒に付けます。
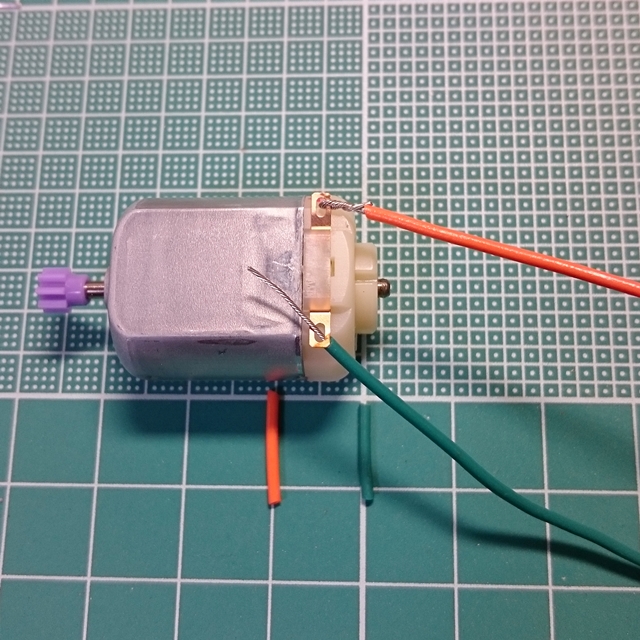
コンデンサの足が少し長いのは、ギヤボックスとモータを固定するツメを避けるスペースを空けているからです。
リード線のモータの反対側は、基板との取り外しが可能なようにコネクタを付けることにします。
圧着コネクタの自作方法については下記のページが参考になりました。
-----------------------------------------------------------------------------
電子うさぎ
コネクタの自作!電子工作の圧着工具と圧着方法
"https://xn--p8jqu4215bemxd.com/archives/397"
-----------------------------------------------------------------------------
日本圧着端子製造 (JST) XHコネクタ ハウジング2P XHP-2 - 千石電商
"https://www.sengoku.co.jp/mod/sgk_cart/detail.php?code=7AN6-5SFL"
日本圧着端子製造 (JST) XHコネクタ ハウジング用コンタクト バラ BXH-001T-P0.6 - 千石電商

"https://www.sengoku.co.jp/mod/sgk_cart/detail.php?code=2AR6-5SFL"
圧着工具があると便利なのですが、あいにく手元にないので先細のペンチでかしめていきます。
リード線の被膜を2mm程度剥いてコンタクト(金具)に挿入しますが、
その際に押し込み過ぎると、最後にコネクタ同士が嵌合出来なくなるので注意が必要です。
(これで1回目は失敗しました。。。)
2個のモータにリード線を接続できました。
リード線の長さは一応、取り回しも考慮して25cmとしましたが、車体をぐるっと取回すケースもあるので40cmくらいあっても(半分の長さで20cmですから)良かったかもしれないとちょっと不安になっています。。。
まぁ、短かったら、そのときはそのときで途中で切って延長しましょう。