リモートコントロール(RC)戦車をつくる【ベースの車体】 [RC戦車]
電子工作で”戦車”をつくろう、ということにしたわけですので、最初にベースとなる車体を準備しなければなりません。このあたりはご多分に漏れずタミヤの工作キットにお世話になることになります。
タミヤ 楽しい工作シリーズ No.168 ダブルギヤボックス 左右独立4速タイプ (70168)
タミヤ 楽しい工作シリーズ No.100 トラック&ホイールセット (70100)
タミヤ 楽しい工作シリーズ No.157 ユニバーサルプレート 2枚セット (70157)

しかし、車体製作のことを記事に書かれているページがあまり見当たらず、ちょっと苦労した点をノウハウとしてまとめます。
①ネジはM3 10mmが最適
ユニバーサルプレートにシャフトの軸受けとかを取り付けていくのですが、その際付属のプッシュピンでは動作させた時の強度に不安があったのでネジ止めにしたいと思いました。
プレートを重ねた時の厚みから、M3 10mmのネジがぴったりでした。
ホイール片側につき4個使用しています。
②ダブルギヤボックスのギヤ比を決める
ギヤボックスを組み立てるのですが、4種類あるギヤ比から最初に1つ選ぶ必要があります。
一度組み立ててしまうとあとから変更は出来ないので、ちょっと慎重になるわけです。。。
タイプA 12.7:1
タイプB 38.2:1
タイプC 114.7:1
タイプD 344.2:1
タイプAからDにかけて「タイプAはスピードは速いけどトルクは無い」「タイプDはスピードは遅いけどトルクはある」という順番になります。
もちろん戦車という乗り物の特性を考慮するとおのずとトルク重視ということで方向性はあっているとは思うのですが、参考にしたWEBページではこの辺は書いてない(-_-;) か、書いてあってもタイプDが主流のようです。
そのためタイプDとCとで悩んだのですが、あんまりスピードが遅いのもかったるくなるので、今回は”タイプC”で決定です!
#実際、この決定が良かったか悪かったかは動かしてみるまでわかりません。。。
③キャタピラの長さを決める
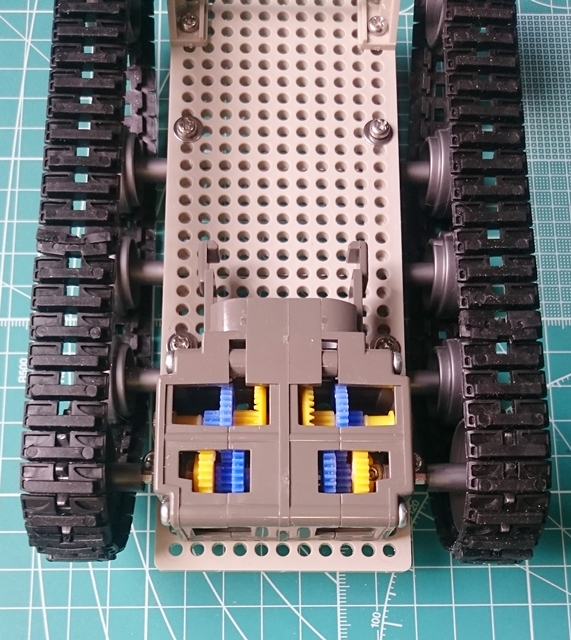
トラック&ホイールセットとユニバーサルプレートを用いて車体を作るのですが、キャタピラの長さとホイールの位置を上手く調整していく必要があります。
キャタピラは片側につき30コマ×1、10コマ×2、8コマ×2のものを組み合わせて好きな長さに出来るのですが、ホイールの位置によっては長さが足らなかったり、逆にブカブカですぐにホイールからキャタピラが外れてしまうので、ちょうど良い長さの位置を見つけるのに試行錯誤しました。
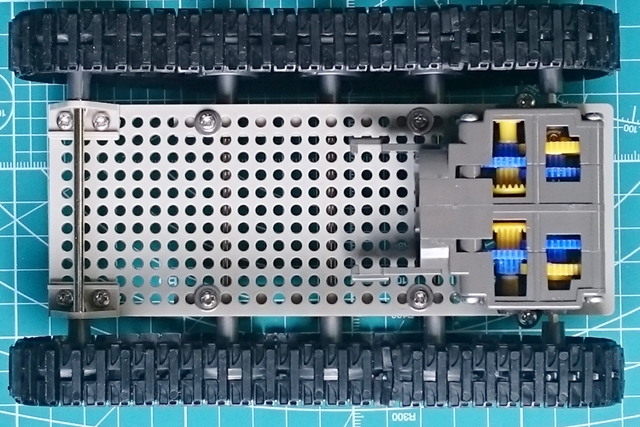
今回は、ユニバーサルプレートをそのまま1枚シャーシとして使っていますので、車体の全長はユニバーサルプレートの長さそのものということになります。
その範囲でキャタピラの長さとホイールとギヤボックスの位置をいろいろと変えていった結果、おそらくこれが最適だろう、という形になりました。キャタピラは片側につき30コマ×1、10コマ×2、8コマ×1 使用しています(8コマ×1余り)。
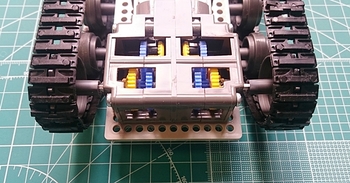
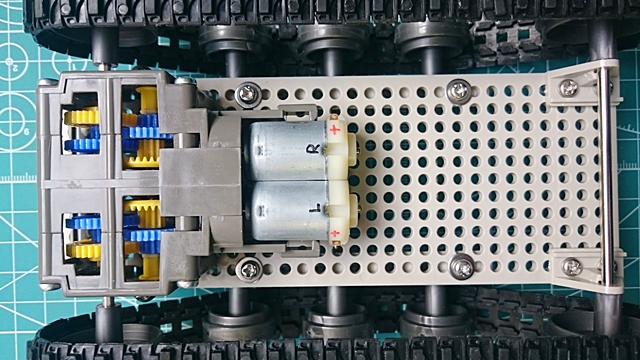
【車体①(上面)】
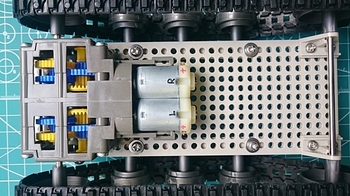
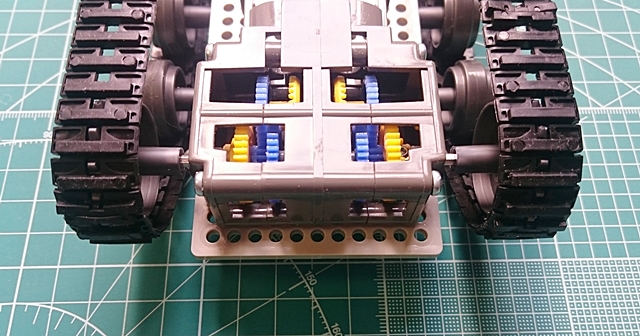
【車体②(前方)】
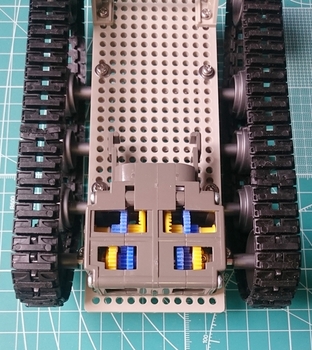
【車体③(前方近影)】
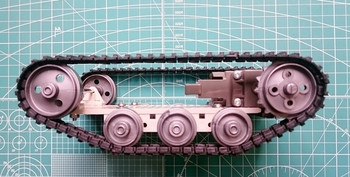
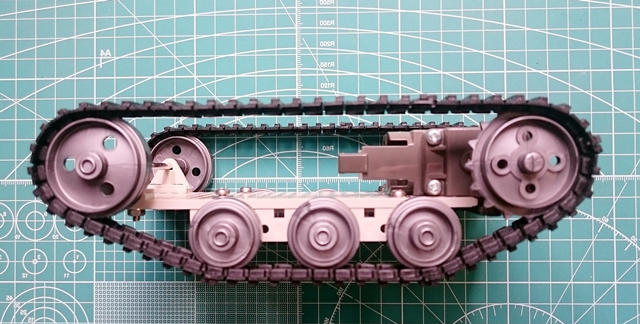
【車体④(側面)】
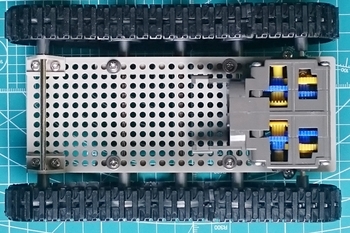
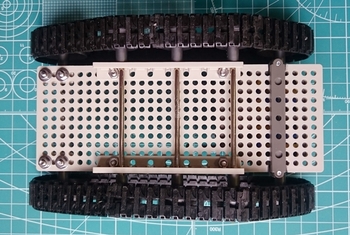
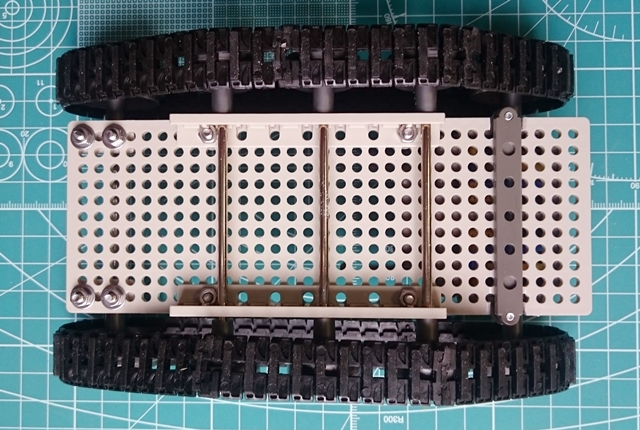
【車体⑤(下面)】
④モータのプラスマイナスを知る
モータにはリード線は付いていませんので、あとから自分でハンダ付けをする必要がありますが、当然、プラスには赤線、マイナスには黒線とか白線とかで区別をしたいわけです。
でもモータの向きが決まっているので勝手にプラスマイナスを決めるわけにはいきません。
一か八かの賭けに出て適当にハンダ付けすると、黒線がプラス。。。ということにもなりかねないので、キチンと調べましたよ、乾電池で。
乾電池2個を直列にしてモータの端子に当て、車体が前進する方向をモータの正転としてプラスマイナスを決めました。
これでプラスに赤線を付けることができます。
【モータ端子のプラスマイナス】

タミヤ 楽しい工作シリーズ No.168 ダブルギヤボックス 左右独立4速タイプ (70168)
タミヤ 楽しい工作シリーズ No.100 トラック&ホイールセット (70100)
タミヤ 楽しい工作シリーズ No.157 ユニバーサルプレート 2枚セット (70157)

しかし、車体製作のことを記事に書かれているページがあまり見当たらず、ちょっと苦労した点をノウハウとしてまとめます。
①ネジはM3 10mmが最適
ユニバーサルプレートにシャフトの軸受けとかを取り付けていくのですが、その際付属のプッシュピンでは動作させた時の強度に不安があったのでネジ止めにしたいと思いました。
プレートを重ねた時の厚みから、M3 10mmのネジがぴったりでした。
ホイール片側につき4個使用しています。
②ダブルギヤボックスのギヤ比を決める
ギヤボックスを組み立てるのですが、4種類あるギヤ比から最初に1つ選ぶ必要があります。
一度組み立ててしまうとあとから変更は出来ないので、ちょっと慎重になるわけです。。。
タイプA 12.7:1
タイプB 38.2:1
タイプC 114.7:1
タイプD 344.2:1
タイプAからDにかけて「タイプAはスピードは速いけどトルクは無い」「タイプDはスピードは遅いけどトルクはある」という順番になります。
もちろん戦車という乗り物の特性を考慮するとおのずとトルク重視ということで方向性はあっているとは思うのですが、参考にしたWEBページではこの辺は書いてない(-_-;) か、書いてあってもタイプDが主流のようです。
そのためタイプDとCとで悩んだのですが、あんまりスピードが遅いのもかったるくなるので、今回は”タイプC”で決定です!
#実際、この決定が良かったか悪かったかは動かしてみるまでわかりません。。。
③キャタピラの長さを決める
トラック&ホイールセットとユニバーサルプレートを用いて車体を作るのですが、キャタピラの長さとホイールの位置を上手く調整していく必要があります。
キャタピラは片側につき30コマ×1、10コマ×2、8コマ×2のものを組み合わせて好きな長さに出来るのですが、ホイールの位置によっては長さが足らなかったり、逆にブカブカですぐにホイールからキャタピラが外れてしまうので、ちょうど良い長さの位置を見つけるのに試行錯誤しました。
今回は、ユニバーサルプレートをそのまま1枚シャーシとして使っていますので、車体の全長はユニバーサルプレートの長さそのものということになります。
その範囲でキャタピラの長さとホイールとギヤボックスの位置をいろいろと変えていった結果、おそらくこれが最適だろう、という形になりました。キャタピラは片側につき30コマ×1、10コマ×2、8コマ×1 使用しています(8コマ×1余り)。
【車体①(上面)】
【車体②(前方)】
【車体③(前方近影)】
【車体④(側面)】
【車体⑤(下面)】
④モータのプラスマイナスを知る
モータにはリード線は付いていませんので、あとから自分でハンダ付けをする必要がありますが、当然、プラスには赤線、マイナスには黒線とか白線とかで区別をしたいわけです。
でもモータの向きが決まっているので勝手にプラスマイナスを決めるわけにはいきません。
一か八かの賭けに出て適当にハンダ付けすると、黒線がプラス。。。ということにもなりかねないので、キチンと調べましたよ、乾電池で。
乾電池2個を直列にしてモータの端子に当て、車体が前進する方向をモータの正転としてプラスマイナスを決めました。
これでプラスに赤線を付けることができます。
【モータ端子のプラスマイナス】
リモートコントロール(RC)戦車をつくる【はじめに】 [RC戦車]
WEBでいろいろな電子工作のページを見ると、スマホやマイコン制御とかで動作させる”戦車”の作成の記事がたくさんあります。
人それぞれに作る動機は様々と思いますが、
・個人の技術スキルや興味に応じていろいろな技術を試してみることができる。
また徐々に改造、レベルアップさせていくことができる。
・工作の自由度が高い。
・安価に始めることができる。
・単純に動くものはおもしろい!(実際に動作させている動画とか見るとおもしろそうです)
ということがおそらく人気の秘密だと思います。
以前にFPGAを使ったディジタル回路設計をしていたこともあったのですが、最近は自作からも離れてしまったので、今回自分の興味の向くままにチャレンジしてスキルアップが出来たらなと思います。
とりあえずの野望としては、
・無線で動かしたい(ラジコンとか赤外線とか)。
・カメラとかセンサとかを制御してカッコよく動かしたい。
・Arduinoとかmbedとかを使ったマイコン制御を組み込みたい。
・プログラミング言語をひとつ習得したい。
・ハードウェア/ソフトウェアの協調動作をしてみたい。
とかとか。。。 気持ち先行でやってみたいことはいろいろあるので頑張ってみたいと思います。
あっ、ここまでやらなくても。。。

※出典:陸上自衛隊ホームページ 富士総合火力演習・そうかえん(https://get.google.com/albumarchive/115305223408918522377/album/AF1QipNWPWoW1M1lAF0uPsUM5Mfyn_7xfI_bOw40DIiP)
人それぞれに作る動機は様々と思いますが、
・個人の技術スキルや興味に応じていろいろな技術を試してみることができる。
また徐々に改造、レベルアップさせていくことができる。
・工作の自由度が高い。
・安価に始めることができる。
・単純に動くものはおもしろい!(実際に動作させている動画とか見るとおもしろそうです)
ということがおそらく人気の秘密だと思います。
以前にFPGAを使ったディジタル回路設計をしていたこともあったのですが、最近は自作からも離れてしまったので、今回自分の興味の向くままにチャレンジしてスキルアップが出来たらなと思います。
とりあえずの野望としては、
・無線で動かしたい(ラジコンとか赤外線とか)。
・カメラとかセンサとかを制御してカッコよく動かしたい。
・Arduinoとかmbedとかを使ったマイコン制御を組み込みたい。
・プログラミング言語をひとつ習得したい。
・ハードウェア/ソフトウェアの協調動作をしてみたい。
とかとか。。。 気持ち先行でやってみたいことはいろいろあるので頑張ってみたいと思います。
あっ、ここまでやらなくても。。。

※出典:陸上自衛隊ホームページ 富士総合火力演習・そうかえん(https://get.google.com/albumarchive/115305223408918522377/album/AF1QipNWPWoW1M1lAF0uPsUM5Mfyn_7xfI_bOw40DIiP)



